在汽车制造中,可靠、准确、快速的零部件检测对于制造过程的顺利进行至关重要。车身必须通过滑撬从一个生产地点安全转移到下一个,铆钉、减振器和其他重要零部件的位置必须进行验证。
倍加福SmartRunner Matcher光截面传感器,非常适合这些任务,因为它们使用准确的激光束检测高度轮廓,并且无论目标物的表面、颜色和对比度如何,都能生成准确的结果。此外,该传感器可通过数字开关信号或网关连接所有常见的现场总线,轻松集成到任何控制系统中。

SmartRunner应用于汽车制造工艺
轮廓对比解决方案
在不同的车身部件被工业机器人抓取、定位、焊接之前,所有车身部件必须准确对齐,由两个 Matcher 传感器分别对准车身面板两侧边缘检查部件是否正确对齐。

SmartRunner检测出目标物的轮廓高度,通过示教功能保存下来,作为参考轮廓进行轮廓比对使用。只有当正确的部件放置在可调公差范围内,两个传感器会输出相应的开关信号,机器人才能不受阻碍地抓取物体,并可避免意外的停机时间和对昂贵车身和机器人的损坏。
当待测零部件符合示教目标时,传感器输出“良好”信号,然后开始进行下一步。如果目标物位置错误,则传感器向控制系统发送“不良”信号。与视觉传感器不同,SmartRunner Matcher的激光传感器在检测过程中不依赖于产品的对比度,并且无需外部照明就能够可靠地检测出与背景颜色相同的目标物。此外,当前X和Z位置与示教的X和Z位置的偏差会传递到控制器,每个传感器可以存储多达32个轮廓。
产品优势
智能传感器 Smart Runner,结合线性光列阵测量技术和 2D 视觉,适用于高精度要求的应用,具有前瞻性的优化流程和广泛的市场机遇。
创新设计的传感器把复杂的轮廓数据变成易于处理的数字量信号,使过程处理变得非常简单。Smart Runner Matcher ,被赞誉为“轮廓对比专家”。

SmartRunner智能传感器
示教对比
SmartRunner在出厂时,已优化对比功能,用于检测与示教轮廓的偏差。通过与示教轮廓的对比,传感器可以验证目标物体及位置/间距是否正确。如果有异常和故障,可以避免碰撞和损坏,减少冗长的机器停机时间。
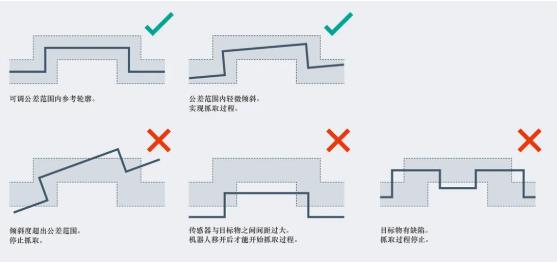
如上图所示,可以看出 Matcher 传感器如何比对物体的轮廓、位置以及基于可调公差范围的距离。
“Good”信号1:Matcher 传感器识别出先前示教的参考轮廓。开始抓取过程。
“Good”信号2:Matcher 传感器检测出公差范围内的轻微倾斜。开始抓取过程。
“Bad”信号3:倾斜度超出公差范围。停止抓取过程。
“Bad”信号4:传感器与目标物之间间距过大。机器人移开后才能启动抓取过程。
“Bad”信号5:检测出目标物不正确或有缺陷。停止抓取过程。



