与其他传感技术相比,雷达具有多种优势,这些优势确保其在汽车主动安全和自动驾驶中的作用将在未来得到充分发挥。雷达可以通过被探测物体的雷达多普勒频移特征来实时探测被探测物体的速度,而且适用于雨、雾、雪等恶劣天气条件。这些优势促使汽车制造商越来越多地采用雷达。在美国,美国国家公路交通安全管理局(NHTSA)与20家汽车制造商达成协议(这些汽车制造商占了99%以上的美国市场),自愿为2022年之前的所有量产汽车配备自动紧急制动(AEB)系统,AEB是一项基于雷达的安全功能。
随着汽车从高级驾驶辅助系统(ADAS)演变为完全自动驾驶,雷达、激光雷达和摄像头等传感器成为确保车辆能够准确感知周围环境的关键输入设备,为车辆提供了所需的信息来做出决定。未来的车辆可能使用多达八个雷达传感器,以便为汽车提供360度全景视图。
汽车雷达测试的演变
汽车雷达的发展和进步给雷达传感器的测试和验证带来了诸多挑战。第一个挑战的核心是满足测试现代汽车雷达日益增长的技术要求,同时保持或降低生产测试成本。现代雷达传感器通常需要76GHz至77GHz的1GHz带宽,而且很少有公司具备在此频率范围内构建测试系统的专业知识。更高带宽的传感器提供更高的分辨率,而雷达制造商已经开发了带宽接近4GHz,中心频率为79GHz的传感器,这使得测试更具挑战性。
虽然未来雷达传感器的技术不断提高,但测试这些传感器的时间和成本必须进行优化,以满足价格和数量要求,进而实现雷达的广泛应用。早期的雷达传感器制造商使用大型射频暗室和角反射器来测试和校准模块的功能。这些暗室通常3或5米长,占用大面积的制造空间。为了减少占地面积,雷达功能测试演变为使用模拟延迟线来模拟远距离雷达障碍物,然后由第二个测试站进行雷达参数测量。
NI车载雷达测试系统(VRTS)等专用系统进一步发展了雷达功能测试。VRTS是一款混合模拟器,内置有矢量信号收发仪(VST),通过高性能低延迟的FPGA将仪器级矢量信号分析仪与矢量信号发生器集成在一起(图1)。该方法通过将功能测试(对象模拟)和参数测试组合到单个测试装置中来集成雷达模块生产测试单元。这一组合减少了制造车间的占地面积,并消除了在测试站之间转换雷达模块的开销,不仅提高了吞吐量,也为其他测试装置腾出了空间。
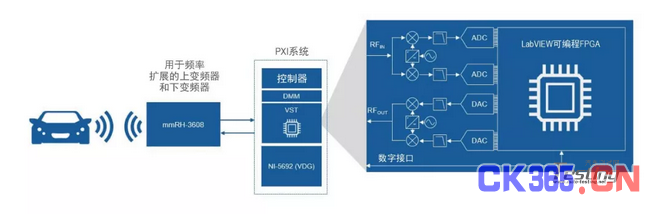
图1:NI车载雷达测试系统框图。
除了汽车雷达测试的更高频率和带宽要求之外,测试未来雷达传感器的下一个挑战是对传感器内日益复杂的软件进行验证。具有1GHz或更高带宽的雷达传感器会产生大量的原始数据。为了避免车辆的通信总线和ECU超负荷,雷达传感器也配备了一个处理器,可以将数据缩减为概要快照。雷达通过传感器当前跟踪的所有对象的摘要定期发送参数化对象表。每个物体都包含距离、速度、雷达截面(RCS)、物体ID和置信度(衡量雷达物体存在的可信度)信息。雷达的软件会检测这些物体并跟踪它们的实时动作。软件算法会寻找不一致性,例如障碍物正在远离传感器,但其多普勒特征却指示其正在接近。
在实验室中,工程师必须验证这些算法和实现这些算法的软件。这些算法的车内现场测试非常重要,但使用紧凑型雷达测试系统进行的实验室测试可以让软件开发人员立即快速验证软件更改。结合用于移动雷达模拟天线的机电一体化组件,VRTS等系统可以生成标准化的雷达环境来描述和验证雷达传感器软件,包括模拟在驾驶测试中很难模拟或者很危险的极端场景。基于模拟器的实验室测试对于保证汽车雷达传感器设计的创新步伐至关重要。
在整个ADAS或自动驾驶系统中,工程师还必须考虑通过雷达仿真来进行系统验证测试。这些系统越来越依赖于传感器的组合,包括相机、激光雷达和雷达。验证自动紧急制动等ADAS功能的整体性能越来越多地利用传感器融合技术,通过两个或更多传感器的组合来提高障碍物检测的质量或置信度。例如,如果ADAS雷达传感器“看到”障碍物,但摄像机却指示路上空无一物,则ECU可以将雷达检测到的障碍物视为幻影或干扰。
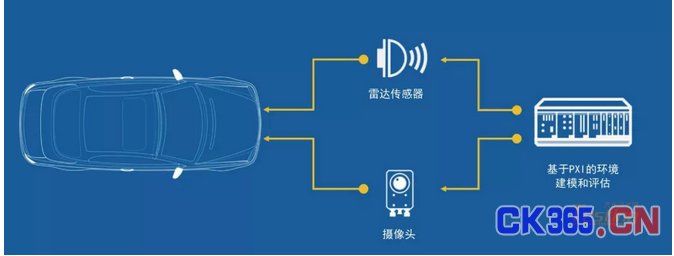
图2:验证用于ADAS和自动驾驶的软件需要同步仿真多个汽车传感器,以便汽车“认为”它在真实环境中驾驶。
当这些功能的测试上升到系统级时,工程师需要一个测试平台来支持大量同步传感器仿真,以模拟车辆感测到的整个周边环境。由于VRTS等系统是基于模块化自动化测试设备标准PXI-Express的,工程师可以通过添加额外的PXI模块(如NIFlexRIO)来支持额外的传感器,以模拟与雷达仿真同步的数字相机输入。
最后,先进的雷达调制技术将对汽车雷达测试的未来产生影响。调频连续波(FMCW)雷达一直是汽车雷达的典型代表。雷达设计人员现在正在寻找使用MIMO天线来增强汽车雷达功能,以精确检测障碍物高度,甚至提供类似于摄像头的光栅图像。雷达传感器研究人员发现采用与蜂窝通信中常用调制方案类似的调制方案可以获得更高的性能。这些方案可以将分配给汽车雷达的频谱信道化,使MIMO雷达能够对并行发射和接收路径之间的单个雷达反射进行表征。
这种方法有望改善雷达分辨率和视场,同时增强雷达对其他车辆干扰的抵抗力。相应地,雷达测试系统也必须越来越复杂。在这些成像雷达的分辨率下准确模拟障碍物可能需要解调单个雷达信道,对每个发射信道应用距离、多普勒和RCS障碍效应,并按照原始方案调制每个信道,然后将该障碍物信号反射回传感器——全部以光速往返。这些要求给雷达测试厂商和供应商带来严峻挑战,亟需具有极高信号处理能力的高带宽低延迟系统架构。






