本文所要解决的主要问题是如何通过图像跟踪的方法来获取飞机的坐标(x, y, z),因此对于导航中所要解决的姿态角的获取问题将不做讨论。由于采用图像跟踪技术实现的导航和眼睛观察目标然后定位的原理相似,因此也称该导航方法为视觉导航。
本文的视觉导航系统,考虑到机载图像采集装置的可维护性及成本等因素,故把图像传感器安装地面跟踪系统上,从而实现地面导航。
引自:《无人机自动着陆过程中的视觉导航技术研究》
资料一:
下面对由转角得到具体的空间位置展开讨论,即视觉导航原理。
2.4.2 地面坐标系的建立
要获取飞机在固定坐标系中的坐标,首先要建立这个坐标系,其目的是为了获取飞机的绝对位置,为了配合第四章的摄像机坐标系变换,本文采用的坐标是以无人机降落的跑道为z轴,飞机跑道上某点为原点建立坐标系,以下称该坐标系为地面坐标系,如图2.7所示。
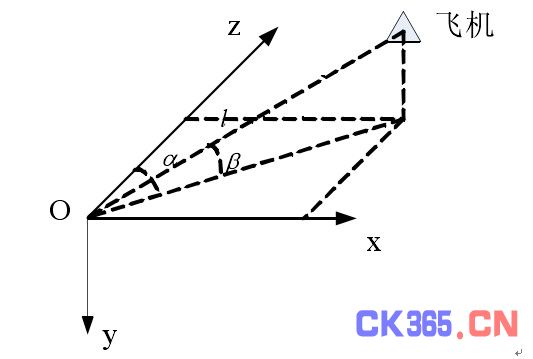
图2.7地面坐标系
在图像跟踪系统中,地面坐标系是以二轴经纬仪两轴焦点为原点建立的,并且与摄像机的中心重合。
2.4.3单摄像机的视觉导航原理
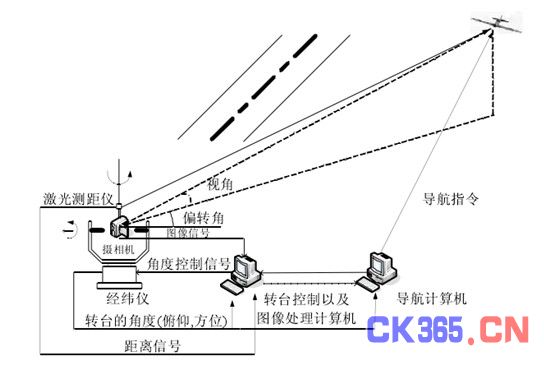
要得到飞机在地面坐标系中的坐标(x, y, z),可以通过测量飞机到原点的距离l,以及飞机与跑道的侧偏角α、飞机的仰角β三个参数来计算飞机在地面坐标系中的坐标。计算方法是:
每个参数的测量及系统的连接示意图如图2.7所示,系统的连接是将摄像机和激光测距仪安装在一个有俯仰和方位两个自由度的二轴经纬仪上,通过经纬仪运动,使摄像机和激光测距仪始终对准飞机。距离信号直接由激光测距仪测出传送到导航计算机和图像处理计算机。而飞机与跑道的侧偏角α就是经纬仪的方位角,飞机的仰角β就是经纬仪的俯仰角。图像处理计算机的任务是将得到的图像理解,计算出目标即飞机的重心在图像坐标中的坐标(u, v),然后根据图像坐标到经纬仪转角的转换,来控制摄像机对准飞机,使飞机始终处于视场中,即实现图像的跟踪。导航计算机只需随时读取经纬仪的角度α和β以及激光测距仪测得的距离l就可以计算得到无人机在地面坐标系下的坐标(x, y, z)。再用其它方法获取无人机的姿态角信息就可以实现无人机的自主着陆导航。因此无人机图像跟踪将是整个系统中的一个关键技术,设计出快速,准确的飞机跟踪算法将是整个系统能否安全工作的关键。
2.4.4双摄像机的视觉导航原理
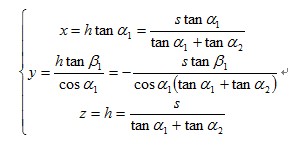
在单摄像机视觉导航系统中,由于只有一个摄像机,从空间三维坐标映射到图像坐标,将丢失一维信息,所以要借助于激光测距仪补充丢失信息。能否在没有激光测距仪的情况下,实现三维定位呢。这自然而然地使我们想到了人类的视觉系统,从而提出了双摄像机视觉导航原理,其示意原理如图2.9所示。双摄像机视觉导航需要两个图像跟踪系统同时工作,它不需要激光测距仪或其它测距装置,它是根据三角测距原理来测定距离的。取两个图像跟踪系统中的某一个的摄像机镜头中心为原点建立地面坐标系,坐标系的x轴上安装另一个图像跟踪系统,设两个图像跟踪系统的摄像机镜头中心的距离为s。两个图像跟踪系统分别独立工作,将各自测得的经纬仪的俯仰角和方位角通过串口或网络传送到导航计算机。双摄像机视觉导航的空间定位原理如图2.10所示,图中A为飞机所在的位置,![]() 可以从两个图像跟踪系统中的经纬仪中直接获取,令HG=h,则由:
可以从两个图像跟踪系统中的经纬仪中直接获取,令HG=h,则由:![]()
可得:
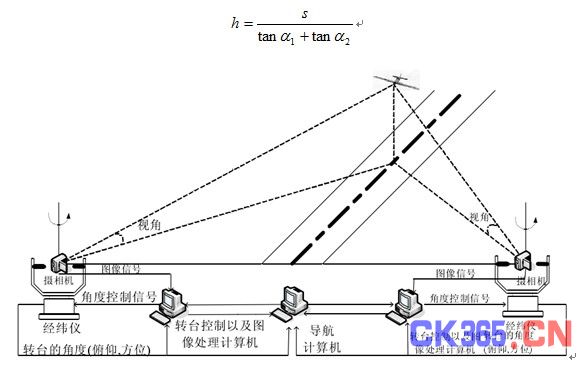
图2.9双目视觉原理示意图
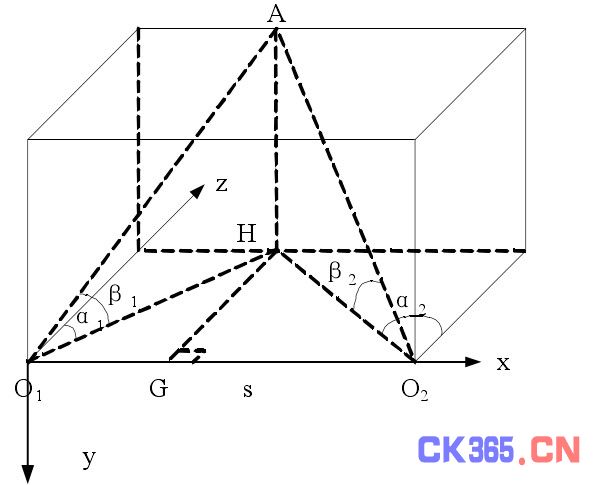
图2.10双摄像机定位原理图
从而可以得到导航参数:
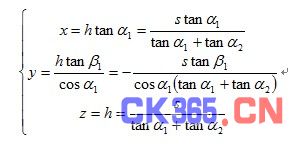
通过以上公式,即可计算出无人机的空间位置,再配合其它导航方式可实现无人机自动着陆导航。
资料二:
移动机器人视觉导航系统的设计
机器人立体视觉的原理
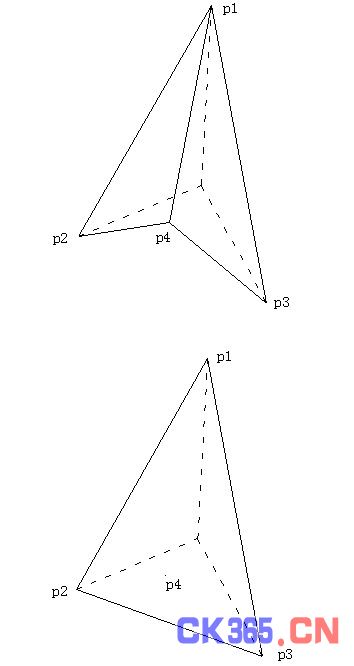
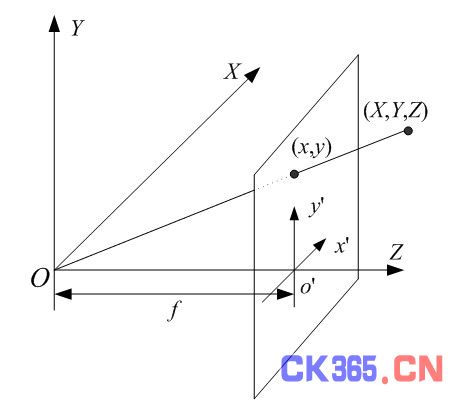
n 一般的摄像机的投影映射关系如图所示,通过摄像机像平面x’o’y’上对空间点(X, Y, Z)所成的像点(x, y)仅能够获得二维信息,无法获得空间点与摄像机的距离信息。
n 立体视觉中左、右摄像机最简单的放置位置如图所示。图中o-XLZL为左摄像机图像坐标,o-XRZR为右摄像机图像坐标,f为摄像机焦距,两摄像机之间的间距为2d,O-XZ为世界坐标系。在物体表面存在着空间一点P,在世界坐标系下的坐标为(Xp, Yp, Zp),该点映射到左右两个摄像机图像坐标系中的坐标分别为:(xl, yl),(xr, yr)。
n 通过几何关系可以得到:
n 场景中一点,分别在左右图像中产生像点,这一对像点称为共轭点。所以,只要能在左右图像中找到相应于场景中某一点的共轭点,应用上页中的公式就可以计算出该空间点的三维坐标值。
立体视觉技术一直都是视觉技术中研究的前沿与焦点问题。根据视觉传感器的个数立体视觉技术可以分为:双目立体视觉和多目立体视觉。立体视觉获取的实质是对视觉图像信息的理解,在这个过程中可以应用许多性能优良的智能算法,如模糊逻辑、人工神经网络和遗传算法等。
双目立体视觉导航移动式机器人
n 本系统设计的视觉导航移动式机器人如左图所示,采用双目立体视觉,通过在实验车前安装双摄像机,如右图所示,以模拟人类双目视觉系统,从而实现移动机器人的自主导航、避障功能。

资料三:
《移动机器人双目视觉导航技术研究》 3.4节双目视觉的三维重建中,有详细的解算目标点三维坐标方法。