mems陀螺仪的原理
MEMS 陀螺仪(gyroscope)的工作原理传统的陀螺仪主要是利用角动量守恒原理, 因此它主要是一个不停转动的物体, 它的转轴指 向不随承载它的支架的旋转而变化.
但是 MEMS 陀螺仪(gyroscope)的工作原理不是这样的,因为要用微机械技术在硅片衬底 上加工出一个可转动的结构可不是一件容易的事.MEMS 陀螺仪利用科里奥利力——旋转 物体在有径向运动时所受到的切向力. 下面是导出科里奥利力的方法. 有力学知识的读者应 该不难理解.
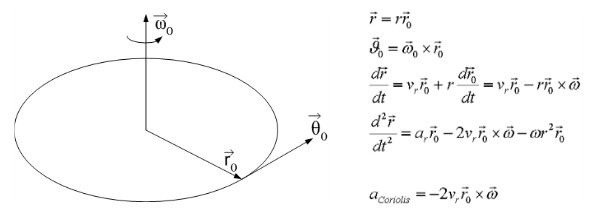
在空间设立动态坐标系(图一).用以下方程计算加速度可以得到三项,分别来自径向加 速,科里奥利加速度和向心加速度.
如果物体在圆盘上没有径向运动,科里奥利力就不会产生.因此,在 MEMS 陀螺仪的设计 上,这个物体被驱动,不停地来回做径向运动或者震荡,与此对应的科里奥利力就是不停地 在横向来回变化,并有可能使物体在横向作微小震荡,相位正好与驱动力差 90 度.
MEMS 陀螺仪通常有两个方向的可移动电容板.径向的电容板加震荡电压迫使物体作径向 运动(有点象加速度计中的自测试模式) ,横向的电容板测量由于横向科里奥利运动带来的 电容变化(就象加速度计测量加速度) .因为科里奥利力正比于角速度,所以由电容的变化 可以计算出角速度.
mems陀螺仪的特点
MEMS陀螺仪是利用 coriolis 定理,将旋转物体的角速度转换成与角速度成正比的直流电压信号,其核心部件通过掺杂技术、光刻技术、腐蚀技术、LIGA技术、封装技术等批量生产的,它主要特点是
1. 体积小、重量轻,其边长都小于 1mm,器件核心的重量仅为1.2mg。
2. 成本低
3. 可靠性好,工作寿命超过 10 万小时,能承受1000g 的冲击。
4. 测量范围大,目前我公司生产的 MEMS 陀螺仪测量范围可扩展到7560?/s。
mems陀螺仪的构成
MEMS 陀螺仪(gyroscope)的设计和工作原理可能各种各样,但是公开的 MEMS 陀螺仪均 采用振动物体传感角速度的概念. 利用振动来诱导和探测科里奥利力而设计的 MEMS 陀螺仪 没有旋转部件, 不需要轴承, 已被证明可以用微机械加工技术大批量生产. 绝大多数 MEMS 陀螺仪依赖于由相互正交的振动和转动引起的交变科里奥利力. 振动物体被柔软的弹性结构 悬挂在基底之上. 整体动力学系统是二维弹性阻尼系统, 在这个系统中振动和转动诱导的科 里奥利力把正比于角速度的能量转移到传感模式.
通过改进设计和静电调试使得驱动和传感的共振频率一致, 以实现最大可能的能量转移, 从 而获得最大灵敏度.大多数 MEMS 陀螺仪驱动和传感模式完全匹配或接近匹配,它对系统的 振动参数变化极其敏感, 而这些系统参数会改变振动的固有频率, 因此需要一个好的控制架 构来做修正.如果需要高的品质因子(Q) ,驱动和感应的频宽必须很窄.增加 1%的频宽可 能降低 20%的信号输出.还有阻尼大小也会影响信号输出.
一般的 MEMS 陀螺仪由梳子结构的驱动部分和电容板形状的传感部分组成. 有的设计还带有去驱动和传感耦合的结构.
mems陀螺仪的选用
陀螺仪在选用时,必须注意被测参数的物理环境和必要的性能指标。具体要求分列如下:
1.性能要求
⑴ .随机漂移、随机游走系数、输出噪声
不同结构形式、不同原理的陀螺仪的对漂移率定义和要求不同,机械式陀螺仪精度使用的是随机漂移,光纤陀螺仪使用的随机游走系数。
随机漂移——指由随机的或不确定的有害力矩引起的漂移率。
随机游走系数——由白噪声产生的随时间累计的陀螺仪输出误差系数。
单位: ?/h1/2、?/s1/2。
输出噪声的单位:?/h/Hz1/2、?/s /Hz1/2 。
输出噪声和随机游走系数的关系如下:
1?/h/Hz1/2=1?/60×h1/2
1?/s /Hz1/2=1?/s1/2
MEMS 陀螺仪使用的输出噪声这个指标。并且一定要选定合适的带宽,在能满足使用要求的前提下,尽量选择带宽较低的陀螺仪,因为带宽越大,输出噪声越大。
⑵.测量范围
选择陀螺仪的量程时,应注意以下几点:
最大输入角速率——陀螺仪正、反方向输入角速率的最大值,在此输入角速率范围内,陀螺仪标度因数非线性满足规定要求。
⑶.阈值——陀螺仪能敏感的最小输入角速率。由该输入角速率产生的输出至少应等于按标度因数所期望输出值的50%。单位:?/s、?/h。
⑷.分辨率——陀螺仪在规定的输入角速率下,能敏感的最小输入角速率增量,至少应等于按标度因数所期望输出增量的50%。单位:?/s、?/h。
选择陀螺仪的测量范围时,最大的角速率是陀螺仪的量程的2/3,最小的角速率应该高于阈值、分辨率。
⑸.标度因数——陀螺仪输出量与输入角速率的比值。
它是用某一特定直线的斜率表示的,该直线是根据整个输入角速率范围内测得的输入、输出数据,用最小二乘法拟合求得。
⑹.标度因数非线性度——在输入角速率范围内,陀螺仪输出量相对于最小二乘法拟合直线的最大的偏差与最大输出量之比。
2.环境要求
⑴.温度范围要求,必须满足陀螺仪使用的极限温度。
⑵.线加速度与冲击。必须满足陀螺仪极限温度
⑶.振动条件,分为正弦振动、随机振动。
3.基本物理参量
主要指重量、体积、功率以及能源种类等方面的要求。
4.可靠性和寿命。
指的是抗冲击、抗干扰的能力和有效的使用时间。
mems陀螺仪的安装
1. 首先要认清陀螺仪上面的标识
 代表为角速率陀螺仪的输入轴(按右手规则)朝上,角速度为逆时针方向。
代表为角速率陀螺仪的输入轴(按右手规则)朝上,角速度为逆时针方向。
 代表为角速率陀螺仪的输入轴(按右手规则)朝下,角速度为顺时针方向。
代表为角速率陀螺仪的输入轴(按右手规则)朝下,角速度为顺时针方向。
2. 陀螺仪的安装基准面是两边的安装法兰盘。
3. 安装陀螺仪时必须将仪表的输入轴与被测角速度的方向同轴或平行。


