事件检测与行为分析系统是一种先进的智能视频分析系统。能够对视频进行周界监测与异常行为分析,可应用于各种公共场所包括机场、车站、港口、建筑物周围、街道、小区、及其他场所,用于检测、分类、跟踪和记录过往行人、车辆及其它可疑物体,能够判断是否有行人及车辆在禁区内发生长时间徘徊、停留、逆行等行为,此外检测人员奔跑、打斗等异常行为。
事件检测与行为分析系统一般能同时监测同一场景里多个目标的不同行为,可以根据防范目标的特点进行灵活设置,包括运动物体的种类和大小;系统能够适应不同的环境变化,包括光照、四季、昼夜、晴雨等,并能够很好地抗摄像头抖动。
事件检测与行为分析系统可实现以下主要功能:
非法闯入禁区: 能够检测是否有行人或车辆进入预定区域,用户可灵活调节灵敏度。比较先进的系统可以有效地检测到不少于 10 个像素的目标;(如图 1 : 1、 2 )
非法逆行: 当行人和车辆在指定区域内逆向运动时,记录并发出报警;(如图 1 : 3 )
异常奔跑: 测试是否有可以人物在指定区域内快速运动;(如图 1 :4 )
打架: 检测是否有打假斗殴事件;(如图 1 : 5 )
动态图像放大: 能控制云台摄像机对移动目标进行放大抓拍,并生成高清晰度图片。(如图 1 :6 )
识别与分类: 对视频中的行人、车辆及其它目标物进行分类;(如图 1 : 7 )
敏感区域滞留: 检测是否有可疑人物或车辆在指定的区域内长时间徘徊或停留,当滞留时间超过预设值,系统将发出报警;(如图 1 : 8)
门禁尾随监测: 检测是否有人尾随通过门禁,发现即刻报警;(如图 1 :9)
聚众: 检测群体聚集、滞留(如图 1 :10 )
物品遗留: 当环境出现物品遗留现象,即刻报警(如图 1 :11)
骤变: 当视频图像发生巨大变化 ( 如摄像头被遮挡和大幅度移动 ) 时系统报警(如图 1 : 12、13)
 事件检测与行为分析系统
事件检测与行为分析系统二. 事件检测与行为分析系统产品形态与系统结构
事件检测与行为分析系统融合视频处理、图像处理、模式识别以及人工智能等多个领域的先进技术。目前主要的产品形式为后端中心处理方式和前端处理方式。
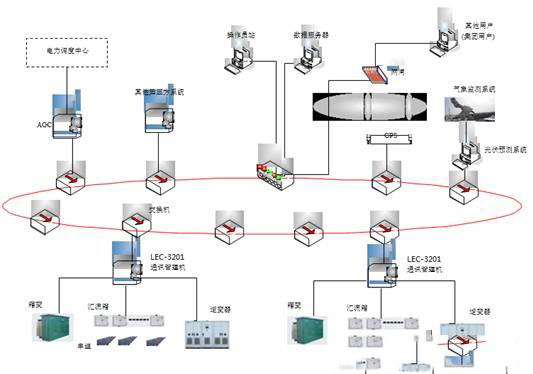
后端中心处理方式使用高性能智能视频服务器进行视频分析。智能分析服务器一般通过软解码方式,解压数字视频流,然后进行事件检测与行为分析运算。中心处理器可整合到第三方视频监控平台中,与主流视频监控平台无缝衔接。事件分析结果和相关参数设置同样通过智能视频传输协议与视频监控平台进行通讯。中心处理方式的系统每个服务器一般可以同时处理8路至16路视频。整个系统的结构如图2所示。

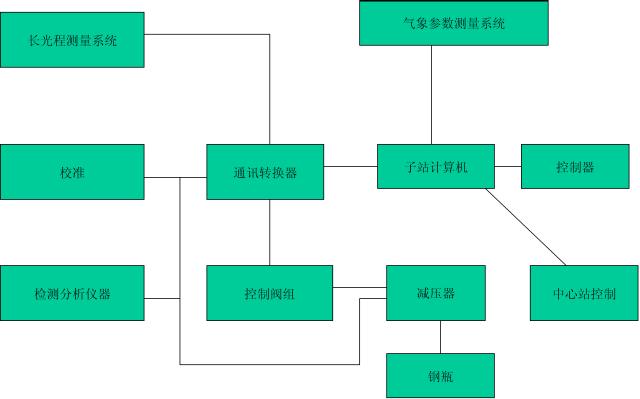
图 3 事件检测系统-前端处理系统拓扑图
三. 事件检测与行为分析系统技术原理与评测
3.1周界检测
技术原理
前景物体检测技术的主要应用。该技术以固定摄像头监控用户所关心的区域,建立背景模型,过滤出前景物体并确定物体的运动路线。基于前景物体的运动路线实现对运动物体的行为判别。该技术的典型应用包括以下4类。
区域进出:用户在监控场景内定义一个多边形区域,当有物体进入、离开即触发报警事件。
区域滞留:用户在监控场景内定义一个多边形区域,当有物体在区域内滞留时间超过规定阈值即触发报警事件。
绊线:用户在监控区域内定义一条线段。当物体运动路线跨越该线段,即触发报警事件。
有向绊线:用户在监控区域内定义一条线段。当物体沿指定方向跨越该线段,即触发报警事件。
应用前提
摄像头需要固定,只在改变监测场景时才移动摄像头,否则无法建立稳定的背景模型;适用于空旷场景,如边防线,厂区周边等环境,一方面可获得较大的视野,另一方面该技术不适用于前景物体拥挤的情况,这时场景下不同物体的前景由于相互粘连无法区分,基于前景而得到的运动路线也同时失效。
在常规测试识别率、误警率和漏报率外,应考察以下针对性测试的结果。
参考测试环境:
抖动:户外摄像头可能由于各类原因发生偶然或周期性的抖动,由于该技术一般要求相机固定,因此需要测试在轻微抖动环境下的技术指标,考察系统性能指标的稳定性。
无关物体:测试环境中出现概率较高的如树叶抖动,花草摇动,云影等干扰物体出现时的误报情况。
天气:该系统的一般定位是全天候工作的实时监控系统,在下雨、雾、雪天气下测试上述技术指标。
光照:户外环境或室内光照变化明显的环境,应进行24小时测试,获得上述三个技术指标判断系统对光照变化的适应能力.
参考指标: 识别率>80%, 误警率<20%
3.2 动态跟踪
技术原理
该技术的目的是实现对于指定目标物体的近距离持续跟踪。目标物体的指定在全景摄像头的场景内完成,在非空旷场景一般由操作人员指定,对于边防线等空旷场景可由计算机自行选择。跟踪过程可分为锁定目标和持续跟踪两个阶段,跟踪摄像头和全景摄像头在物理上可以是同一个,主要取决于具体应用的需求和产品自身的水准。
在锁定目标阶段有两种技术实现,一种是基于特征模式分析的跟踪,例如以RGB图像进行模版匹配,由于摄像头逐渐拉近,物体的位置和大小同时发生变化,这时的锁定速度越高,则物体从视野中丢失的风险也越大,对于目标的速度大小及方差没有先验的情况下,一旦目标丢失重新锁定的代价很大,而相比之下锁定速度慢的代价则要小的多,特别对于军政机关方面的敏感应用,应首先确保不丢失目标,其次考虑锁定耗时。另一种是通过标定场景三维信息实现,锁定的速度可以有明显的提高,但标定过程比较繁复,且全景摄像头一旦改变角度,一般需用标定,维护的代价较大。
由于动态跟踪的应用带有较明显的敌我对抗性,在持续跟踪阶段,技术上必须对于目标物体改变运动方向、运动速度、暂时被遮蔽甚至故意躲入障碍物有一定的适应能力。另一方面跟踪摄像头自身的动态性能也直接影响跟踪的稳定性,这里的动态性能主要包括摄像头机械运动控制部分的时间常数、信令传输的延迟以及控制协议解析机制的合理性。
应用前提
避免在拥挤场景下使用该技术,场景拥挤程度越高,该技术的实用性也随之下降。特别是采用多个跟踪摄像头接力的系统,在国内的应用场景下,其系统整体的跟踪稳定性尤其需要通过实际测试加以验证。
摄像头安装尽量避免产生目标物体与周围运动物体持续严重遮挡的情况。
评价方法
除常规测试外,应根据应用需求选择以下针对性测试:
锁定测试:单独测试锁定目标这个阶段的成功率。
静止测试:目标长时间静止,考察系统自身稳定性。
变速测试:在持续跟踪阶段,目标突然停住、改变方向或改变速度。
遮蔽测试:目标周期性被行道树或电线杆遮蔽,或目标蓄意躲入障碍物。
疑似目标测试:目标与其他运动物体相遇,或在目标被暂时遮蔽时,周围出现其他运动物体。
3.3 逆行检测
技术原理
该技术用于出入口检测逆向进出的人或物体。主要的技术特点在于根据物体运动模式来探测物体的逆行,在拥挤场景下仍然适用。
应用前提
摄像头安装角度尽量减轻人或物体之间的遮挡。建议俯视角度在45度~90度之间,摄像头视线应基本与人流方向一致,水平偏角在正负30%之内。
评价方法
除(基本部分)叙述的测试方式外,可附加下列针对性测试:
拥挤场景针对性测试:? 以人行出入口为例,假设出入口水平方向可容纳N个人,可令2N~4N的人以较自然的方式结队通过,同时安排一人从相反方向进入,主要检测系统的漏报率。
短暂/局部行为针对性测试: 安排一人在检测区域内以身体的部分(如手臂、上身等)作相反方向的运动,或作短暂的后退动作(可根据应用需要),主要检测系统的误报率。
参考指标: 识别率>80%, 误报率<20%
3.4 行人异常行为
技术原理
该技术用于检测监控区域内疑似抢劫或犯罪后逃窜的高危行为。技术实现主要有两种。一类实现仍然基于前景物体检测,根据前景物体的运动路线来估计其速度,超过一定的数值就报警。这种速度估值的精度较低,而且无法克服摄像机近大远小的问题;同时,无法区分行人和自行车上的人,实用性不高。第二类实现采用特征运动模式分析技术,用模式识别的方法对于场景各部分可能出现的运动模式和运动速度进行学习,不但可以侦测出异常加速,对于罪犯逃窜时翻越栏杆、矮墙等平时出现机率很低的行为,也能够识别。
应用前提
场景中运动人员以步行为主,摄像机俯视角度不低于30度,俯视角度较小时,应提高架设高度避免人之间的严重遮挡。