1.引言
随着汽车工业的飞速发展, 拥有私家轿车的人越来越多, 将会出现的交通问题也会随之越来越多。其中安全倒车是刚拿驾照或车龄不久的开车人士最为担心的问题之一, 只要稍不留神不仅会给自己或别人带来损失, 还有可能造成不必要的争吵。针对上述问题, 我们设计了一个倒车防撞报警器, 能以声音或者更为直观的显示告知驾驶员周围障碍物的情况, 解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰, 并帮助驾驶员扫除了视野死角和视线模糊的缺陷, 提高了安全性。
2.总体结构设计
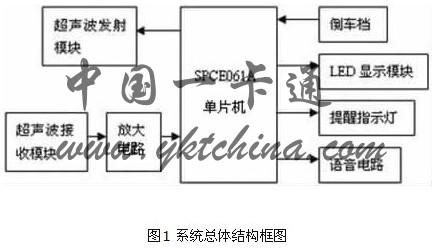
该系统主要由SPCE061A 单片机、超声波传感器和距离预警模块三部分组成。系统总体结构如图1 所示。
2.1 控制核心单元
SPCE061A 是台湾凌阳科技公司所研发生产的一款高性能、低功耗的16 位微控制器, 有多达十四个的中断源, 是性价比很高的一款十六位单片机。SPCE061A 的指令系统采用精简指令集, 执行时间短, 能够快速地处理复杂的数字信号。同时SPCE061A 拥有8 路10 位精度的ADC, 其中一路为音频转换通道, 并且内置有自动增益电路; 两路10 精度的DAC, 只需要外接放大电路即可完成语音的播放, 这为实现语音提醒提供了方便的硬件条件。
2.2 传感器模块
该模块由超声波发射器和超声波接收器两大部件组成。主要是完成超声波的发送和接收, 其中对所收集的电信号进行放大比较, 使得SPCE061A 单片机能够获得更为精确的数据。
2.2.1 超声波发生器
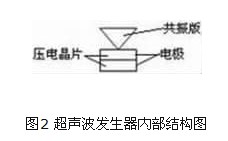
超声波发生器采用的是压电式超声波发生器。压电式超声波发生器利用压电晶体的谐振来工作。它有两个压电晶片和一个共振板, 当它的两极外加脉冲信号, 其频率等于压电晶片的固有振荡频率时, 压电晶片将会发生共振, 并带动共振板振动, 便产生超声波。发生器内部结构如图2 所示。超声波发生器与SPCE061A 的引脚IOA1 连接, 通过软件来控制发生与否。
2.2.2 超声波接收器
超声波接收器包括超声波接收探头和信号放大两部分。超声波接收探头必须与发射探头的型号相对应, 主要是频率要一致, 否则会因无法产生共振而影响接收效果, 甚至无法接收。
由于经探头变换后的电信号非常弱, 因此必须经放大电路放大。超声波接收器所接收的信号通过SPCE061A 单片机的IOA2 引脚可以直接输入单片机内部进行处理, 从而简化了系统的硬件电路。
2.3 距离预警模块
该模块主要包括: 语音、LED 点阵及提醒指示灯, 驾驶员转倒车档时触发启动条件系统跟随启动, LED 点阵显示车尾与障碍物之间的距离。当与障碍物距离小于预设范围(1m、0.5m、0.25m)时, 分别发出不同的"BI、BI"报警声(正常、较快、急促), 同时以之相对应的提醒指示灯开始闪烁, 闪烁程度与报警声相应, 以达到增强提醒的效果。
3.软件设计
3.1 主程序
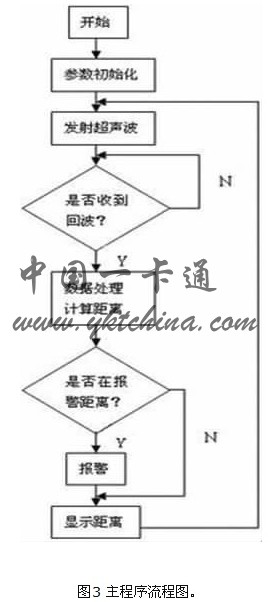
主程序主要完成系统的初始化, 控制触发脉冲信号的发射与接收, 计算车尾与障碍物的距离, 判断所测距离是否在所对应的范围内, 以驱动显示电路和发声电路。主程序流程如图3 所示。
3.2 超声波测距
算法由于倒车时汽车的行驶速度较慢, 和声速相比可以认为汽车是静止的, 因此在系统中可以忽略多普勒效应的影响。超声波测距就是利用其反射特性。超声波发射器不断发射出某一频率的超声波, 遇到障碍物后反射, 当超声波接收器接受到反射信号,将其转变为电信号, 测出发射波和反射波的时间(T), 根据S=C×T/2即可求得距离(S)。其中C 为超声波波速, 常温下取为344m/s。
4.结束语
该系统利用了SPCE061A 强大的实时控制和数据处理能力, 显着的提高了可靠性, 精确度, 此外, 以单片机来实现有着结构简单、工作可靠、测量误差小等特点。系统通过LED 点阵可以直观的显示出车尾与障碍物的距离, 为驾驶员提供了方便。当障碍物距离小于系统设定的报警距离时, 系统点亮提醒指示灯, 并发出同步语音提示, 及时提醒司机刹车, 防止汽车的碰撞或擦伤, 使该系统具有很强的实用性。



