汽车内部、汽车与汽车之间以及汽车与基础设施之间的通信和网络正在悄然发生变革。许多重要的设计挑战得到了成功地解决,例如采用软硬件方法满足严格的带宽、容错、决断和可靠性要求。事实上,许多硬件和软件中的通信与控制协议都有了显著进步。这些协议包括:FlexRay、控制器区域网 (CAN)、日本汽车软件平台和架构(JASPAR)、本地互联网(LIN)、美国汽车工程师学会(SAE)的J1850、汽车开放系统架构 (AUTOSAR),媒体导向系统传输(MOST)协议和FireWire (1394)标准。MOST协议正在进入越来越多的汽车信息娱乐系统,主要是欧洲产的汽车中。目前MOST还没有得到普及,但丰田的Prius汽车正在使用25MBps版本的MOST。用于150Mbps网络的MOST规范版本3有望不久后发布。
对于车身、传动系统、底盘和其它控制来说,没有一种协议和架构可以被认为是“十全十美”的解决方案。通常情况下,组合和改进这些方案对提供灵活性和满足汽车控制与通信需求非常有用。例如,JASPAR最近被用于新一代车载网络的新版FlexRay所采用。FlexRay联盟准备在FlexRay协议规范V3.0和物理层规范V3.0的主要修改点中采纳JASPAR技术建议,这些规范将在2009/2010时间段内发布。
FlexRay一直被用作汽车应用中的主要骨干网(图1)。德国和日本的OEM商已经决定在他们的车载网络中采用FlexRay。全球首款商用化FlexRay的汽车是宝马的旗舰X5运动型多功能车(SUV)和7系车。

图1:FlexRay车载网络协议可以用作CAN、LIN和MOST等其它网络的骨干网,实现车载控制和信息娱乐应用。
FlexRay定义了一种双通道的10Mbps数据结构。每个通道可以用来独立地实现冗余机制,汇聚数据速率可达20Mbps。FlexRay联盟的核心成员包括宝马、通用汽车、大众、戴姆勒克莱斯勒、博世、飞思卡尔半导体和恩智浦半导体(NXP Semiconductors,下文简称NXP)等。他们希望FlexRay能成为先进的传动系统、底盘和线传控制汽车系统的标准,即便它的成本比目前到广泛使用的1Mbps CAN协议高得多。大多数成员认为FlexRay将与其它协议共存,而不会替代它们。
“FlexRay最初是专门针对容错和冗余设计的,现在它也正被用来在提高带宽,特别在可以利用CAN等其他网络实现更高带宽的地方。”NEC电子美国公司汽车策略业务部首席技术应用工程师Jens Eltze表示。
“一些汽车制造商不太愿意采用基于FlexRay、FireWire等新技术的标准。在其他公司加入进来之前,他们不想冒可能成功也可能不成功的风险。”NEC电子美国公司汽车策略业务部营销经理Dave Stone表示。

图2:恩智浦半导体公司的TJA1080A FlexRay收发器是首个在车载网络方面得到认证的节点收发器(a),它已经被集成到TJA1081/1082 IC中(b)。
减少FlexRay和CAN的成本差异
一些IC芯片制造商试图缩小FlexRay和CAN之间的成本差异。奥地利微电子(AMS)公司和TTTech汽车公司正在合作开发低成本的FlexRay收发器件。他们计划进一步增强研发力量,开发FlexRay车载网络节点。
他们合作的目标是提高车内数据通信的可靠性并降低成本,例如优化的FlexRay拓扑可以集成大量的节点。此外,这两家公司设计了一个位整形器电路,可以让汽车OEM商和一流供应商通过采用更低成本的配线类型,降低电缆成本。这两家公司还计划合作开发针对FlexRay芯片的测试流程。
“FlexRay芯片的价格肯定会降下来,以缩小FlexRay和CAN实现之间的巨大成本差异。”NXP业务线汽车安全与舒适事业部高级总监和总经理Toni Versluij指出。
NXP在2006年推出首个FlexRay收发器芯片TJA 1080A,紧接着推出了TJA1081和TFA1082节点收发器,此外还提供TJA1085有源星型耦合器。NXP至今已经交付了100万个符合物理层规范的FlexRay收发器。十多年来,该公司已是FlexRay芯片以及CAN和LIN器件的领先供应商。
“在今后十年中,CAN将是车载网络节点的首选。”Versluij认为(图3)。他指出,虽然具有双通道的FlexRay最初是为需要冗余功能的线传控制应用设计的,但大多数汽车应用使用CAN就能处理的单通道拓扑。CAN采用SAE的J1850总线工作,后者被广泛用于车载故障诊断(OBD)II。
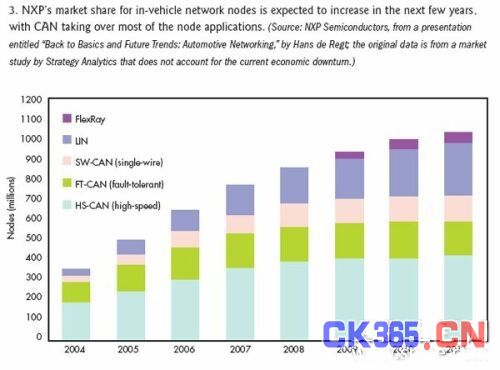
图3:今后几年里恩智浦半导体公司车载网络节点的市场份额有望不断增长,其中CAN将接管大多数节点应用。
Versluij还指出,FlexRay在元器件级别的实现成本要超过CAN。“但在系统级,情况则不一样。” Mentor Graphics的系统工程事业部的总经理Serg Leef认为,“CAN在带宽和可靠性方面具有很大的局限性。为对此进行补偿,工程师在设计网络时只使用总带宽的很少一部分,以便提高消息能及时到达的可能性,但这也降低了CAN的性价比。”
NEC电子美国公司等IC制造商正在继续更新其智能传感器和高级控制器的汽车产品线,以支持所有的流行的车载网络,如FlexRay、CAN、LIN、MOST、USB和以太网。德州仪器(TI)公司也提供支持FlexRay、CAN和LIN的芯片。
“我们为这些网络提供集成在收发器内的标准单元和内核。”TI公司模拟/混合信号部门的系统工程师Scott Monroe表示。他指出,虽然CAN在车内的用量有很大增长,但需要将那些非紧急的CAN节点与安全关键性节点分开。
MCU也被大量用于FlexRay网络。飞思卡尔半导体的S12XF MCU就是一个例子。这个MCU包含了集成式FlexRay技术。Adura Systems公司在模块化电子可扩展架构(MESA)传动系统中选用了这款IC。MESA传动系统提供高达100英里的纯电动汽车驱动技术。
汽车内的MCU(经常被用作电子控制单元(ECU))的数量越来越多,这不仅增加了成本,而且这些MCU提供的过多控制功能不断增加了复杂性。今后的发展趋势是采用模块化的控制单元,每个模块控制车载网络中汽车功能的一个特定子集。设计师正在试图将车内典型的35至40个MCU(有的车型甚至有多达100个 MCU)精简到20至25个集成相同功能的单元。然而,对那些具有许多ECU的高级设计来说,CAN可能会达到其极限。
对汽车来说高等级的决断和实时响应需求非常关键。告警系统问题是在检测往前开的汽车在直行或变更车道时是否在车道内或车道外时发生的。汽车防撞告警系统必须能在高速条件下实时工作,并使用多个低成本传感器测量复杂的三维场景。
种类繁多的CAN
市场上有许多版本的CAN协议。CAN在车上的使用最早可追溯到1994年。最流行的三种版本分别是容错CAN(FT-CAN)、高速CAN(HS CAN)和单线CAN(SW-CAN)。所有CAN都用于车门、天窗、仪表板、温度控制等自动车身控制功能。HS-CAN还用于传动系应用,包括引擎、传动和变速箱以及防抱死刹车系统(ABS)。
另外一种CAN是时间触发式CAN(TT-CAN)。然而,许多人对TT-CAN抱怀疑态度,主要原因是TT-CAN线缆长度很有限。带宽在1Mbps时最大长度只有40米,因此只能局限于短距离应用。
“当你忽略CAN协议的优点而把它用于较长的线路长度时,那它就不是CAN了。”CAN协议最早开发人员之一、C&C Group公司首席执行官Wolfhard Lawrence表示。目前他专业从事汽车软件、系统和网络的测试工作。
CAN协议具有较大而且可变的抖动。为了使TT-CAN更可预测和更加可靠,美国凯特灵大学的研究人员Juan R.Pimentel和Mentor Graphics公司的Jason Paskvan做了各种试验,以表征基于实际CAN的通信架构中的抖动特性。他们提出了一种更具确定性的FlexCAN,这是一种用于线传控制应用的拓扑,不会降低灵活性(图4)。
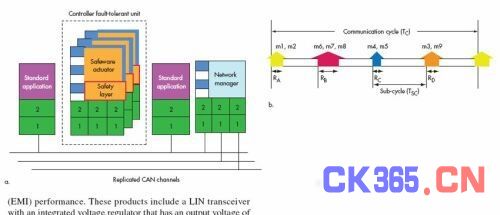
图4:FlexCAN是一种用于线传控制应用的拓扑,不会降低灵活性。
寻找最佳平衡点
Delphi公司的B.Perry Compton提出了一种串行通信协议,这种协能够在CAN和FlexRay之间达到开销、复杂性、吞吐量、成本和实时性能的最佳平衡。Compton将他的协议称为“Goldilocks”,并指出,这不是单个协议,而是基于单个消息调度原理的协议集(图5)。

图5:Goldilocks控制器试图在开销、复杂性、吞吐量、成本和实时性能之间取得最佳“平衡点”。Goldilocks后向兼容CAN车载网络协议,在性能和功能方面与FlexRay车载网络协议相比极具竞争力。(来源:Dephi Automotive公司)
Goldilocks与CAN的优先级仲裁是一致的,但它基于DMA原理执行调度和离线仿真。另外,它不限制仲裁总线速度。
在低成本方面,LIN总线为车载网络应用提供每节点最低的成本。这种串行总线能以最快19,200波特的速度实现智能传感器和激励器的互连,线缆长度最长达40米。LIN也常被用作CAN子总线。
Atmel公司提供第二代系列高集成度LIN系统基础芯片。这些芯片具有6kV静电放电(ESD)保护和增强的电磁干扰(EMI)性能,所带的LIN收发器内置了输出电压为3.3/5V的稳压器。另外,Atmel公司还将推出同时内置稳压器和看门狗定时器的芯片。
俄罗斯公司Finprom Resouce将MSP LIN技术用于奥迪A6的汽车座位控制。据该公司介绍,这种技术可以提供最佳的经济、灵活和功能组合。
Finprom还为自适应车辆系统提供AVAS数字化车辆控制技术。这种技术基于相同的电子元件、公共通道和通信协议,将汽车通信通道中的信息密度提高到97%,并将通道内的服务信息共享降低了3%。AVAS技术采用标准电源线进行通信,兼容CAN和LIN拓扑。
软件是关键
鉴于车内大量控制器件、激励器、传感器和互连线带来的复杂性,软件成为车载网络设计中的关键部分就毫不奇怪了。Vector CANtech公司总裁Bruce D.Emaus指出,汽车嵌入式软件的规模非常庞大,今天的高端汽车要求上百兆字节的软件代码。
Emaus表示,他们遵循AUTOSAR等开放软件标准,因此能够保证软件代码的可复用性、软件开发成本的降低和可移植性。Robert Bosch LLC公司提供的汽车产品也支持AUTOSAR,并希望这个标准能成为全球标准。
AUTOSAR等软件对车辆之间以及车辆与基础设施之间通信的影响将越来越大。Emaus指出,用户功能要求、政府条例要求、网络中使用车辆复用、通信协议、所使用的OEM特殊网络运作策略都在不断增加,并且系统架构种类也在增加,特别是在使用了线传控制子系统的情况下。所有这些意味着软件增长的强烈势头。
“汽车就像蜂窝电话一样,”Continental Automotive Systems公司连接业务部执行副总裁Kieran O’Sullivan表示,“它们将变成更宽网络上的一个节点。”
NEC电子美国公司计划为其32位V850系列MCU以及带嵌入式FlexRay控制器的V850E/PH03 MCU,开发AUTOSAR兼容的MCAL微控制器驱动程序。该公司就这一项目正在与ETAS和KPIT Cummins Infosystems展开合作。
Mentor Graphics公司展示了首个针对AUTOSAR的支持工具。这个名为Volcano车辆系统架构(VSA)的工具还支持针对FlexRay、CAN和 LIN的嵌入式软件设计。Volcano的模型驱动设计流程可以帮助用户减少设计汽车元件、嵌入式软件和网络中采用的下行数据验证和物理原型创建的工作量。用户可以在软件编程流程之前进行关键的设计决策和验证,从而缩短产品的上市时间。
Vector Informatik公司推出了一种用于消息类总线通信系统的数据交换格式,称为现场总线交换格式(FIBEX),用于帮助AUTOSAR软件的开发。这种格式以XML为基础,包含了描述整个车载网络所需的所有信息。这些信息包括网络拓扑、配置参数、调度、帧、信号及其位级的编码。FIBEX已经成为 FlexRay总线系统的一种标准。
Vector Informatik还与The MathWorks公司合作使其设计工具与AUTOSAR应用程序具有互操作性。用户可以在Vector Informatik公司用于AUTOSAR的Davinci Developer中定义元件架构,然后将元件导出到the MathWorks公司的Simulink中去。
一些领先汽车制造商和公司,如丰田、Denso、摩托罗拉和Delphi,在使用The MathWorks的软件产品来改进设计,并实现高度复杂和集成的车载网络系统。这是因为它们能创建一个公共平台用于共享系统规范和开发思想,这样的网络系统包括AUTOSAR、FlexRay、CAN和LIN。
支持AUTOSAR的另一家公司是提供开发工具的dSPACE公司。它在SystemDesk版本2.0中增加了一个支持AUTOSAR版本2.1和3.0的仿真模块。利用这一模块,用户可以仿真复杂大规模ECU网络中的单独软件模块,并验证所有软件模块间的交互。
Synopsys公司提供的Saber开发环境可用于确保信号完整性的车载网络仿真和分析。Synopsys公司技术营销负责人Thorsten Gerke表示,许多车载网络元件和网络版图会影响信号完整性,包括电感、变阻器、电缆类型和长度以及电缆终端。



