变频驱动技术已深入我们生活的每个角落,如变频空调、冰箱、洗衣机等家电。现在变频驱动主要使用PWM合成驱动方式,这要求其控制器有很强的PWM生成能力。
SPMC75 系列单片机是由凌阳科技设计开发的16位微控制器芯片,具有变频专用的PWM发生模块,其内核采用凌阳科技自主知识产权的μ'nSP微处理器。 SPMC75系列单片机集成了能产生变频电机驱动的PWM发生器、多功能捕获比较模块、BLDC电机驱动专用位置侦测接口、两相增量编码器接口等硬件模块;以及多功能I/O口、同步和异步串行口、ADC、定时计数器等功能模块,利用这些硬件模块支持,SPMC75可以完成诸如家电用变频驱动器、标准工业变频驱动器、多环伺服驱动系统等复杂应用。
1 引言
系统输入电源电压为AC110V/AC220V,经全波整流后供系统使用。系统使用Sunplus公司的 SPMC75F2413A产生AC三相异步电机的VVVF控制所需的SPWM信号,并完成 系统控制。使用智能功率模块实现电机的功率驱动。在AC220V输入时,系统最大能驱动1.5KW的负载。系统的变频区间为2Hz~200Hz。
2 系统框图
系统结构如图2-1所示,主要由变频电机、电源供给、IPM功率放大、IPM隔离驱动、SPMC75F2413A组成的控制核心几部分构成。
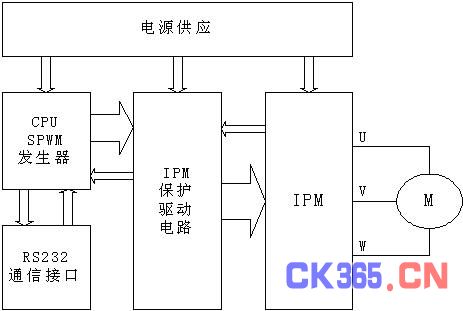
图 2-1 系统结构图
3 感应马达V/F控制
3.1 功能描述
利用SPMC75F2413A的TMR3实现AC三相异步电机的V/F 开环控制。使用DDS(直接数字频率合成)的方式产生控制所需要的三相SPWM。根据电机的V/F曲线随频率自动调整输出电压的大小。由于DDS固有的特点,在进行频率调整的过程中相位是连续的,用户可以在任何时候更改输出频率而不需关心当前的相位问题。同时,用户可以根据自己需要更换波形数据表而实现非正弦的波形输出。
3.2 设计原理
3.2.1 感应马达V/F控制原理
在电机调速时,最重要是要保持磁通
式中:
由式(2--1)可知,只要控制好
1.基频以下调速
由式(2--1)可知,只要保持
2.基频以上调速
当基频以上调速时,频率往上升高,但
将以上二种情况结合起来就可以得到异步电机如图 3-1所示的变频调速特性。同时这也是变频电机调速的V/F曲线图。在实际运用中,V/F开环控制也是沿着这条曲线进行的。
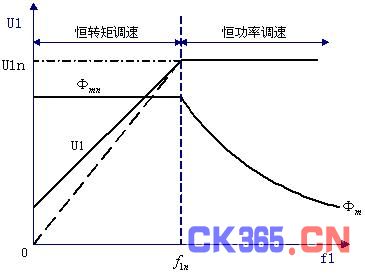
图 3-1 三相感应电机的V/F曲线
3.2.2 正弦波生成原理
要使三相感应马达正常运行,需要使其电枢绕组通以三相交变电流,以产生圆形旋转磁场。产生三相交变电流的方法有很多,本例中使用SPWM来产生三相正弦电流。图 3-2 是三相SPWM生成原理
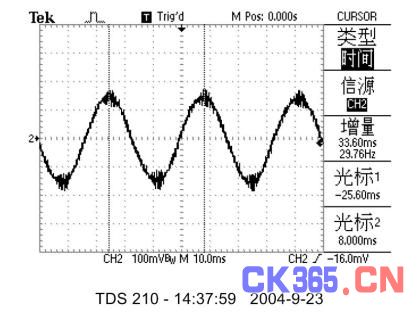
图 3-2 三相SPWM生成原理
本例使用DDS(直接数字频率合成)的方式产生SPWM。如图3 -3 所示,整个系统是一个典型的DDS频率合成系统,只不过用PWM发生模块去替换了传统的DAC。在本系统中波形数据表的大小为1024点,PWM载波频率为10KHz。波形数据表取1024点一是为了计算方便,因为在相位累加后查表的过程中有一个相位截取的操作(我们的相位累加器是16位的,而波形数据表是1024点--10位),为了加快这一处理过程,选用以
图 3-3 三相SPWM生成原理图
注意:本例所讨论的一些公式都是保证波形的幅度精度比相位精度高情况。实际上,当幅度精度变差时,相位误差会变大。本例中的波形数据表不限于标准的正弦表,用户可以根据自己的需要决定自己的波形。如加入三次谐波的增强型波形等。在V/F控制中,当频率比基频低时,调制系数小于1,有效样点数会比实际样点数少,因为幅度调制使波形的幅度分辩率下降,会出现样点重复的情况。因此,建议用户在低频时提高 PWM的分辨率。
4 软件说明
系统的软件部分主要是完成AC变频马达的V/F开环变频驱动功能,主要包括SPWM发生的中断服务函数,DMC通信协调等几个部分。
4.1 主流程与说明
主程序在完成系统初始化以后,就不断检测有没有来自PC的控制信息,如果有便完成相应的控制功能,没有就继续检测。
主程序主要完成各个模块的初始化,而后便监视UART的数据接收情况,如果收到了有效的波形参数数据,则调用 SPMC75_SPWM_VF_account(unsigned int F,unsigned int Kvf,int Moto) 对波形参数进行预置更新,而波形数据将在预置更新完成后的第一个PWM周期中断中完成波形数据更新操作。主程序流程如图 4-1所示。
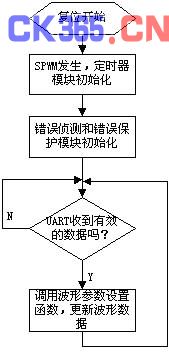
图 4-1 主程序流程
4.2 中断子流程与说明
进入PWM的周期中断片后,程序首先判断有没有新的波形参数设置,如果没有就直接进入DDS频率合成,如果有则先更新波形参数(相位增量和幅度调制系数),而后进入DDS频率合成。DDS合成是在每一次PWM的周期中断,波形相位在原相位的基础上加上用户设置的相位增量值N(这个值正比于波形频率),而后查出这个相位所对应的幅度值,同时还查出距这个相位120度和240度的二个相位对应的幅度值,最后将这三个值分别乘以幅度调制系数AM后送入PWM产生模块产生相应占空比的PWM信号。其流程图如图 4-2所示。
x图4-2 TMR3周期中断服务流程
5 实测波形
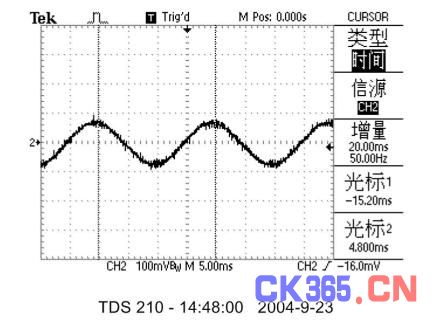
以下是驱动例的实测电流波形:
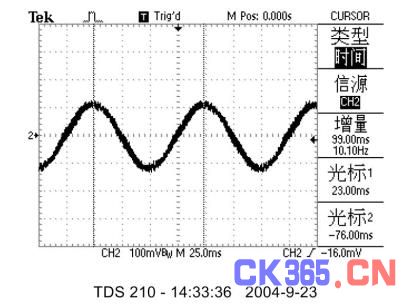
图5-1 10Hz时的电流波形 100mV/A
图5-2 30Hz时的电流波形 100mV/A
图5-4 70Hz时的电流波形 100mV/A
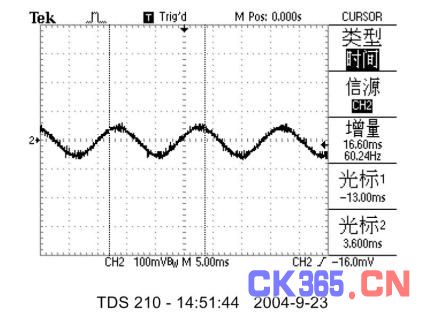
图5-4 70Hz时的电流波形 100mV/A
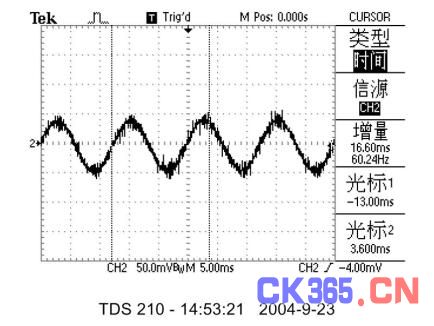
图5-5 100Hz时的电流波形 100mV/A
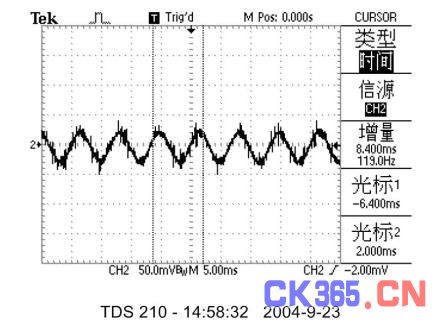
图5-6 150Hz时的电流波形 100mV/A






