
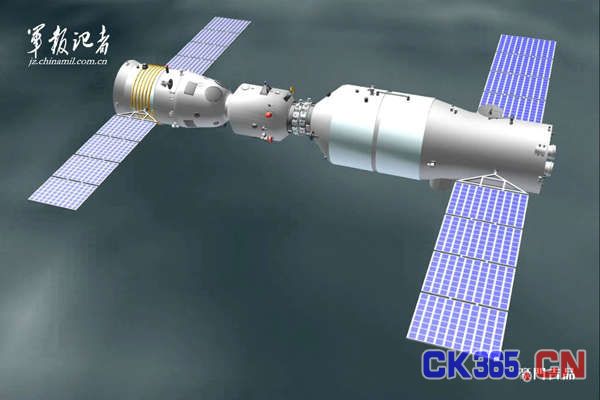
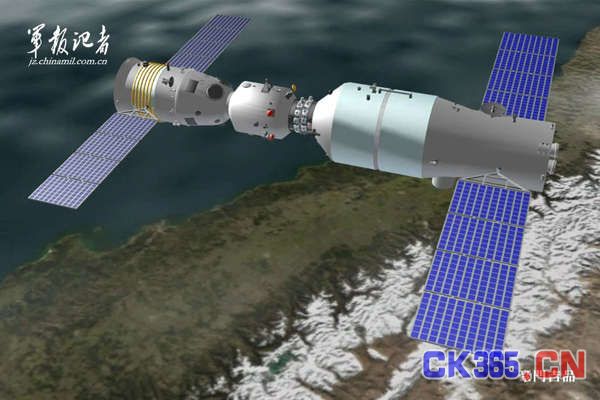
天宫一号神舟八号交会对接示意图

天宫一号神舟八号交会对接示意图

天宫一号神舟八号交会对接示意图
天宫一号神舟八号交会对接示意图
天宫一号神舟八号交会对接示意图

天宫一号神舟八号交会对接示意图
空间交会对接涉及两个飞行器,一个是目标飞行器,一个是追踪飞行器。目标飞行器首先发射升空,追踪飞行器作为主动飞行器去寻找目标飞行器进行交会对接。在交会对接过程中,追踪飞行器的飞行可以分为以下四个阶段:
远程导引段
在地面测控的支持下,追踪飞行器经过若干次变轨机动,进入到追踪航天器上的敏感器能捕获目标飞行器的范围(一般为15~100千米)。
近程导引段
追踪飞行器根据自身的微波和激光敏感器测得的与目标飞行器的相对运动参数,自动引导到目标飞行器附近的初始瞄准点(距目标飞行器0.5~1千米)。
最终逼近段
追踪飞行器首先捕获目标飞行器的对接轴,当对接轴线不沿轨道飞行方向时,要求追踪飞行器在轨道平面外进行绕飞机动,以进入对接走廊,此时两个飞行器之间的距离约100米,相对速度约1~3米/秒。
对接停靠段
追踪飞行器利用由摄像敏感器和接近敏感器组成的测量系统精确测量两个飞行器的距离、相对速度和姿态,同时启动小发动机进行机动,使之沿对接走廊向目标最后逼近。在对接前关闭发动机,以0.15~0.18米/秒的停靠速度与目标相撞,最后利用栓-锥或异体同构周边对接装置的抓手、缓冲器、传力机构和锁紧机构使两个飞行器在结构上实现硬连接,完成信息传输总线、电源线和流体管线的连接。


