【摘要】本文阐述了立式全自动连续式立式包装机落料原理,介绍了控制难点及台达PLC控制实现程序。
【Abstract】This paper expounds the vertical automatic successive vertical packaging machine blanking principle, and introduces the control difficulties and delta PLC control realize the program.
【关键词】连续;间歇式;立式自动包装机;落料控制
【Keywords】continuous; intermittent;vertical automatic packaging machine;blanking control
立式包装机是将卷筒状的挠性包装材料制成袋筒,充入物料后,进行封口,三个功能自动连续完成的机器。配合上道的计量冲填机械,立式包装机常用于包装块状、片状、粒状、梗枝状、粉状以及流体和半流体物料。立式包装通常分为连续式包装机和间歇式包装机。
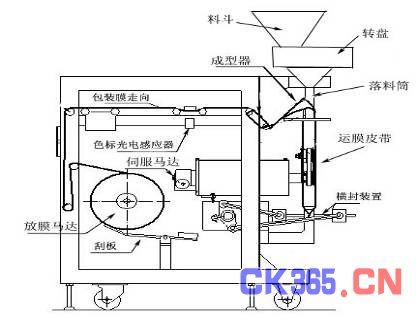
图1 间歇式垂直包装机
1 连续立式包装机工艺介绍
如图1所示,间歇式垂直包装机的横封装置固定在一个位置上,每次封口的时候,拉薄膜的动作定制,封口达到一定时间以后才能脱开再继续拉薄膜,而连续式垂直包装机则可以不停止拉薄膜动作,在实施完全压合动作过程中整个横封台保持与薄膜牵引一致的速度,完成以后退开横封台,到一定位置后再飞快退回到上面的位置上。因为连续式生产效率高,目前连续式代替间歇式是个趋势。但是同样是连续式,有机械凸轮实现的,有利用伺服电机利用电子凸轮实现两种方式。其中机械式在跟换包装膜长度时需调整机械应用十分不方便,且机械惯性大,速度不能提高。所以连续式包装机用电子凸轮控制伺服方式就成为首选。
目前,制袋、封口、日期打印、切断袋膜等功能前期已完善,客户已在德国汉诺威参加过包装展,相关文章也已有介绍,本文重点介绍关于电子秤落料填充与包装之间的配合问题。
过去间歇式填充包装为根据物料信号启动包装动作,即来一个物料信号就进行相应的一次运膜、纵封、横封等动作,逻辑简单。而现在为连续式采用这种方式显然是不行的。
2 落料填充难点分析

图2 落料填充示意图
如图2所示,其秤量装置离包装很高,大约有2~3米,粉末状物体如洗衣粉。从空中落到袋内需要2~4秒得时间。对于连续式包装控制难度要求比较大。下面分为两种情况做一介绍。
情况一,如果落料时间短可以忽略不计(加中间斗,落料时间300ms),实际运行时如图3,在热封伺服固定角度促发开秤电磁阀即可(连续式包装机热封为电子凸轮,可从程序中设置角度。)
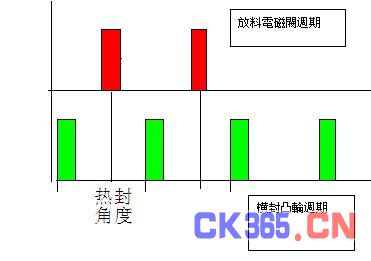

图3 落料时间忽略不计情况下的运行图
根据热封的电子凸轮周期0~360设定促发开启放料阀即可。比如,在开机前假设设定50度,放料。实际出现夹料。调整促发角度到150,直到合适为止。因为落料时间足够短,一个周期按120袋来算也有500ms。
情况二是往往客户不加中间斗的情况很多,在包装食品级颗粒物时,避免中间环节污染,往往不加中间斗。也就是从打开放料到落到袋内,落料时间长,大约有1~4s时间不等。
假设落料秤从开启电磁阀到落到袋里大约有2s的时间。实际切袋速度为每分30袋到120袋,以每分60袋来算控制,控制过程如图4所示,左边为下料信道,在设定速度为60袋时需先打开电磁阀,等即将落到底部时启动拉模及封切。
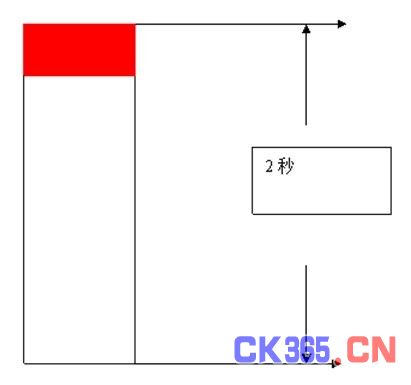
图4 控制过程图
[pagebreak]
在打开第一个电磁阀间隔1s后打开第二个电磁阀。如此则在落料桶内同时有两包料,必须保证在后续的热封电子凸轮运行周期此完全吻合才能确保无误,如图5所示。
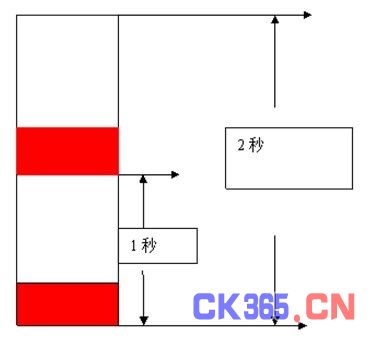
图5 控制过程图
运行时序图如图6所示。
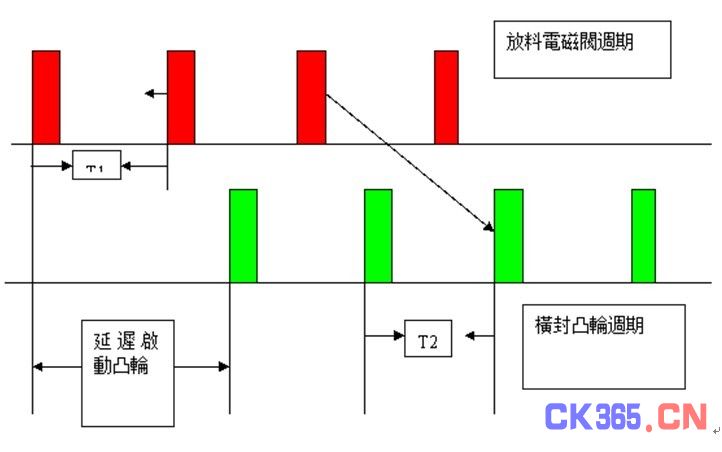
图6 运行时序图
每次当前横封的为前隔一袋的,图6为基本60袋的时序图,对应不同速度时序图也要改变假设是120袋,500ms一个周期,前面需提前依次打开可能四次电磁阀;热封凸轮第一次热封的是开始放料的第一袋,是已经放的第四袋。热封启动前在空中料道内已有四袋。
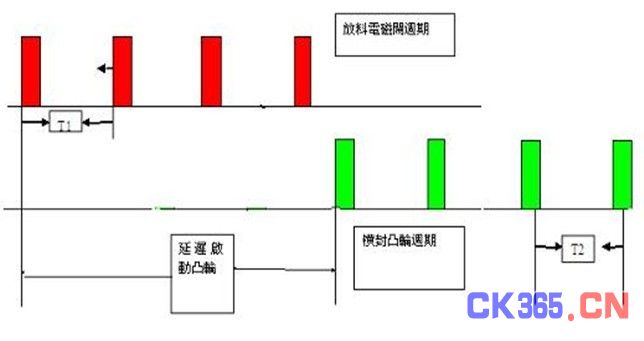
图7 运行时序图
这样由于凸轮滞后几个周期运行,就无法采取上述凸轮周期内位置点促发的方案,只用按照设定填充速度,采用时间促发放料电磁阀难点主要在于如果设定60袋,假设电磁阀按照每1s一个周期打开,实际拉膜及横封速度不一定是1s,有可能是1.1s,有能是0.9s一袋,这样时间长了就会运行中偏差越大。导致夹料,如图7所示。
3 落料填充解决方案
现在主要的问题是如果以时间为周期,开启电磁阀,无法使实际运行的凸轮周期与其完全吻合。只能以实际凸轮运行周期促发电磁阀,才可以保证周期完全吻合。在凸轮未运行之前,先用时间促发电磁阀。在前面两个周期,凸轮实际未走,用时间周期促发电磁阀,等到第三个周期凸轮才实际运行。切换到设定角度输出电磁阀,这样既解决了凸轮延迟启动无法依靠角度促发放料电磁阀的问题,又解决了单纯依靠时间促发电磁阀,长期运行放料周期与凸轮运行周期累积误差的问题,如图8所示。

图8 运行时序图
4 程序实现
在人机上选择开关打到填充模式,如图9所示。
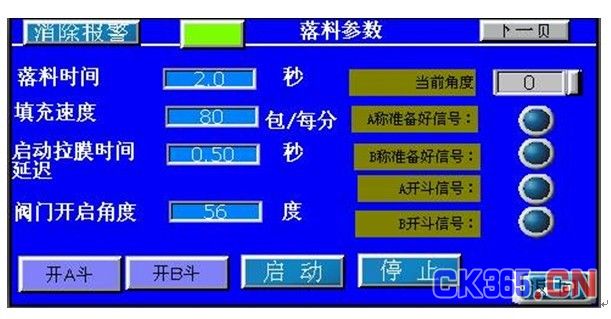
图9 人机界面示意图
在人机上设定落料时间和填充速度,如图10所示。

图10 人机界面示意图
通过程序计算实际需提前放几袋,假设落料时间2s,速度40袋,一袋的周期是1.2s。 2s/1.2s=1.67,需要两袋依靠周期时间促发,如图11、12、13所示。
经过实际运行,分别速度由40-60-80-120试运行,包装填充稳定。
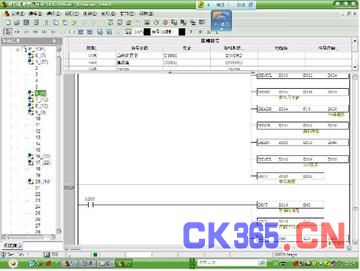
图11 计算界面

图12 依靠时间促发两袋后允许角度促发
图13 开始时间周期促发电磁阀2次,后转为凸轮角度促发
5 结束语
由台达人机、PLC、变频器和伺服组成的立式自动包装机控制系统轻松实现用户提出的要求;稳定可靠的产品品质,简单便易的操作方法,体现了台达机电产品整合系统的优越性;系统实现了全自动生产,大大提高了生产效率;丰富的故障诊断功能提高了作业人员检修设备的便利性。
作者简介:中达电通股份有限公司 余强
余强,男,出生于1969 年 12 月,毕业于安徽机电学院电气工程系工业自动化专业,曾就职于信息产业部第八研究所和科大创新股份有限公司自动化分公司工程部,现就职于中达电通股份有限股份有限公司PLC产品开发处,主要专注于PLC在自动化的高端运用,包括各类机械设备的精密运动控制及工程项目的过程控制的研究与市场开发。




