关键词:自主车辆;视觉传感器;图像处理;模式识别
0 引言
20世纪80年代,具有广阔应用前景的自主车辆受到中西方各国的普遍关注。自主车辆接收的大部分信息来自机器视觉。CCD将行车路面转换为光电图像信息,并通过计算机进行相关处理,快速在复杂环境中提取有用信息并产生合理的行为规划。为了满足自主车辆地面自动辩识技术对识别率的预定要求,本文分别对地面图像信息采集模块、机器视觉图像处理模块、神经网络模式识别模块进行了设计与研究。
1 地面图像信患采集模块
该设计将上海中为智能机器人有限公司出品的教育型机器人Leobot—Edu作为试验载体,将大恒DH—HV2003UC—T视觉传感器安装在车体之上,并对常见的五种行车路面(石子路面、水泥路面、土壤路面、草地路面、砖地路面)进行地面图像信息的采集。为了提高模式识别结果的准确性,该设计中对每一路面都进行了6次采集作业,并搜集到6组地面图像信息,将其中质量最好的一组地面图像信息作为训练样本,将剩余的5组地面图像信息作为测试样本。本文以训练样本中石子路面为例,进行分析说明,其路面原图如图1所示。
该设计训练样本中石子路面图像的压缩编码图如图2所示。
3 神经网络模式识别模块
应用Matlab中BP神经网络模块进行分类与识别。人工神经网络简称为神经网络。人工神经元k表示为:

式中:xi为输入信号;wik为神经元k的突触权值;m为输入信号数目;uk为线性组合器的输出;bk为神经元单元的阈值;f(·)为激活函数;yk为输出信号。神经元的输入/输出状态表示为:
式中:τij为突触时延;Tj为j的阈值;wij为i到j的突触连接系数;f(·)为变换函数。
该设计在分析多种数据分类方法和理论之后,以石子路面、水泥路面、土壤路面、草地路面、砖地路面5种常见行车路面为研究对象,采集了6组路面图像特征信息作为备选库,其中以质量最优的一组路面图像特征信息作为训练样本,把其他5组路面图像特征信息作为测试样本进行BP神经网络的建立、训练、测试。
3.1 BP神经网络的建立
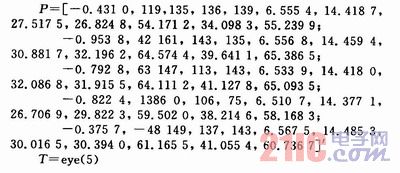
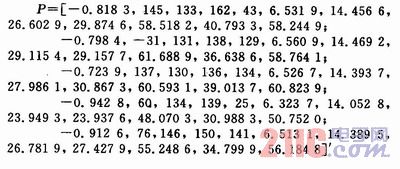
该设计在BP神经网络的建立过程中应用newff()函数对各个参数进行了相关设置。其训练样本、目标样本如下所示:
3.2 BP神经网络的训练
该设计在BP神经网络的训练过程中应用train()函数对各个参数进行了相关设置,其显示周期、学习速度、最大训练轮回数、目标函数误差如下所示:
3.3 BP神经网络的测试
该设计在BP神经网络的测试过程中应用sire()函数对各个参数进行了相关设置,其测试样本如下所示:
该设计中5种路面图像的BP神经网络模式识别训练目标函数误差为20%,实现了方便快捷的模式识别分类功能,结果如图8所示。