关键词:监控;主扇风机;DCS;积分分离PID;ARM9
0 引言
矿井主扇风机是矿山的主要通风设备,任务是排除矿井中的粉尘和污浊气体,降低矿井内的瓦斯浓度。但国内大多数煤矿产业中使用的主扇风机控制技术,多年来一直没得到改善,没有完善的安全监控仪表设施和装置,而且需要24 h值守的工作人员。因此,要提高煤矿生产的安全性,改善主扇风机工作人员生产环境恶劣和生活的极度不方便等问题,必须解决风机自动化控制技术和监测技术。本文介绍了一种自适应矿井主扇风机监控系统的设计方法,有效地解决了以上问题。
1 主扇风机的结构
为了保证矿山作业的安全,矿井中的主扇风机必须24 h工作,因此主扇风机采用了双冗余结构,如图1所示。
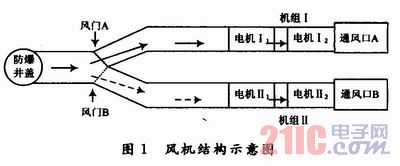
矿井中的通风系统必须处于长时间不问断运行状态,若是一直运行一个风机组,会影响风机寿命,所以每个矿井有A,B两个通风口,需要配置机组I、机组Ⅱ两套机组,每套机组分别有两个电机。两个风机组必须每隔一段时间进行切换运行,以延长风机设备的寿命,同时也能防止某台风机组由于长时间不运行而出现故障的情况。
这种双冗余结构也能有效地提高主扇风机工作的可靠性。一旦当前运行的风机组出现故障时,另外一套风机组需要在最短时间内启动工作,以保证通风系统的时刻运行。
2 主扇风机监控系统的设计
2.1 系统总体结构
主扇风机监控系统的设计采用了DCS集散控制系统结构,是一个由过程控制级和过程监控级组成的以通信网络为纽带的多级计算机系统,它综合了计算机(Computer)、通信(Communication)、显示(CRT)和控制(Control)等4C技术,其基本思想是分散控制、集中操作、分级管理、配置灵活。主扇风机监控系统涉及温度、转速、压力等多点多类型物理量控制,因此非常适合DCS的应用。
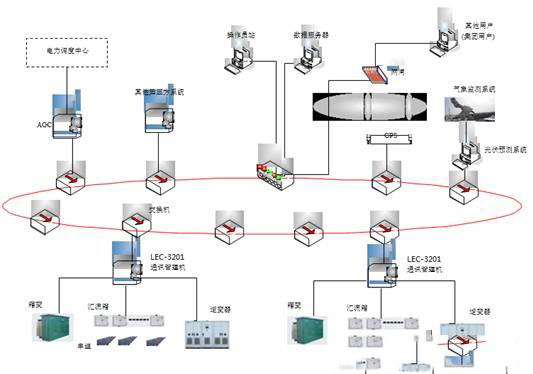
系统结构分为三层,仪表层、控制层和监督层,如图2所示。
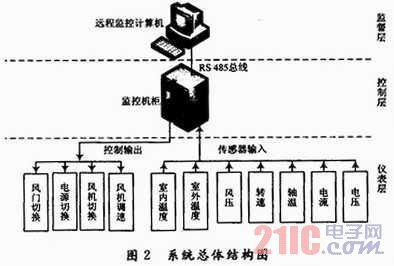
第一层为监督层(上层)。主要作用是提供人机交互界面,对风机进行远程监控,显示并且保存风机的运行参数,提供事故追忆功能。
第二层为控制层(中层)。主要作用是处理仪表层检测到的数据,通过特定的算法控制,驱动可控部件,使风机运行在特定状态。同时通过RS 485总线与监督层通信,将现场参数与事件上传给监督层。
第三层为仪表层(下层)。主要作用是使用各类传感器获取现场参数,包括:温度传感器检测风机轴温和室内外温度,风压传感器检测井内风压,转速传感器检测风机转速,电量检测单元检测风机电参数后,通过传送到控制层,同时还能进行电源、风机、风门的到位检测。
2.2 硬件设计
主扇风机监控系统的硬件结构如图3所示。
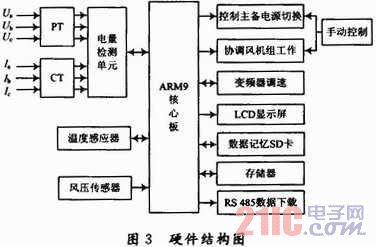
主控制器使用的是ARM9核心板。电量检测单元检测风机的电状态包括:电压、电流、功率、功率因数等参数。温度传感器检测风机的轴温,风压传感器检测矿井中的风压。ARM9核心板根据采集到的数据控制可控模块,控制主备电源切换,控制风机组的工作切换,控制变频器调速。LCD显示屏提供现场人机交换界面,数据记忆SD卡提供现场数据备份,存储器储存用户设置的现场额定参数,RS 485总线用于与上位机通信。同时主备电源的切换与工作风机组切换也可以使用手动控制。
2.3 变频调速控制风压的积分分离PID模型
2.3.1 标准PID控制算法
在模拟系统中,PID的算法为:
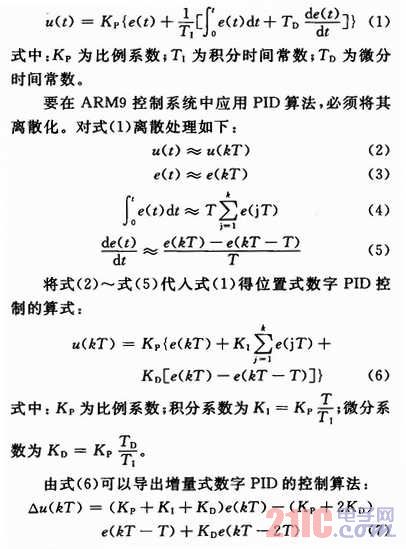
系统的控制框图如图4所示。

2.3.2 积分分离PID控制算法
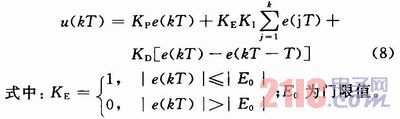
在该系统中,如果e偏离较大,系统在启动、停止或大幅度调节时,由于积分项的作用,会出现饱和和较大的超调量。为了消除上述现象,可以采用积分分离算法,将PID和PD结合起来,在误差比较大,超过某一规定值时,取消积分,只用PD控制,改善系统的动态特性;在误差比较小时,采用PID控制,保持稳态特性。
积分分离的PID算法为:
2.3.3 积分分离PID控制算法参数设定
在变频控制系统中,使用合适的KP,KI,KD,KE等参数,可以达到优质的控制效果。该工程中确定参数的方法是在实际中使用经验法来确定PID控制器的最优参数。先根据经验给定参数值,然后闭环运行观察系统的响应情况,根据响应情况反复调整参数,直到得到满意的结果为止。
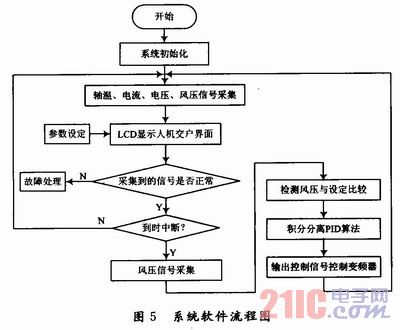
2.4 控制流程
系统软件使用C语言编写,使用模块化编程,采用了中断模式的程序结构,有效地提高了系统的效率。系统软件控制流程图如图5所示。
3 抗干扰设计
监控系统的工作环境往往是十分恶劣的,在运行时会受到来自系统内部和外部的干扰。嵌入式系统在比较复杂的情况下,会出现测量不准,控制错误,状态混乱,死机等情况。而矿井主扇风机是否正常运行,关系着矿山生产的安全,因此要保证监控系统的可靠安全运行,抗干扰设计是必不可少的。
3.1 硬件抗干扰设计
在硬件方面,使用通过EMC认证的电源模块给系统供电。在PCB制作时,要严格按照PCB抗干扰设计的原则,布线时尽量减少回路面积,减少回路噪声;电源线和地线尽量粗,除减少压降外,还可以降低耦合噪声。信号采集模块输入以及开关量输入/输出时需要添加光电耦合隔离器,切断两个电路之间的电气联系。
3.2 软件抗干扰设计
在软件方面,使用软件看门狗技术、软件陷阱技术,以及数字滤波技术。ARM9系统中自带看门狗定时器,当看门狗定时器溢出时,在中断子程序中使用跳转指令,跳转到错误处理程序,从而实现对“跑飞”程序的引导。在应用程序中插入软件陷阱程序,当CPU正常运行时,不会执行软件陷阱程序段,当系统受到干扰“跑飞”的时候,由于程序计数器PC值错误,落入了软件陷阱程序,软件陷阱程序就将程序引导到正确的程序地址。在程序关键的地方加入“NOP”指令,增强陷阱程序的捕捉能力。在采样温度、风压等环境参数时,由于电信号和磁场环境的干扰,采样值与实际值之间容易出现较大的偏差,该系统中使用防脉冲平均值滤波法。每次采样时,采样N(N>6)个值,去掉采样值的最大值和最小值,再将剩下的N-2个值取平均,得到的值作为最终采样值输入。这样,就可以有效地消除脉冲干扰。
4 结语
安全生产是矿山工业永恒的主题,主扇风机作为保证矿山安全生产的重要设备,必须保证连续运行。而工作状态监控系统是保障主扇风机连续运行的重要手段,本文根据国内矿山工业主扇风机的使用状况,研究设计了一种基于ARM9的矿井主扇风机监控系统。系统可对轴温、风压、供电电压、供电电流等多种与主扇风机运行状况相关的参数进行实时监测记录,通过积分分离PID算法,使变频器对矿井风压进行自适应控制,同时通过RS485与上位机通信,实现远程控制。该设计有效地解决了目前国内大多数风机控制不能根据实际情况自动调整排风量,需要24小时人工值守,耗能大,可靠性和实时性差等问题,具有一定的实用性和推广性。