摘 要:对我国现有的北京、上海、广州的地铁列车自动运行系统进行分析、比较,并指出了国产化列车自动运行系统的设计思路。
关键词:地铁,列车自动控制系统,列车自动运行系统,国产化
对于城市轨道交通系统高效率、高密度的要求来说,列车自动控制系统(ATC)是必不可少的。其中一个重要的子系统列车自动运行(驾驶)系统(ATO)能模拟有经验的司机完成驾驶列车的任务。ATO子系统利用地面信息实现对列车牵引、制动的控制,使列车经常处于最佳运行状态,提高乘客的舒适度,提高列车准点率,节能能源。
许多国家都在研究ATO系统,且取得了一定的成绩。我国在此项技术上尚属空白。本文将对比分析三套ATO系统技术特点。
1 ATC与ATO简介
ATC是一套以安全和效率为目的、调节列车运行间隔的自动控制设备,通过车载设备、地面设备、车站和控制中心组成的控制系统完成列车运行控制。ATC系统包括三个子系统:列车自动监控系统(ATS),列车自动保护系统(ATP)和列车自动运行系统(ATO)。
ATS子系统实现监督、引导列车按预定的时刻表运行,保证地铁运行系统的稳定性。它通过转换道岔建立发车进路,并
ATP子系统具有超速防护、零速度检测和车门限制等功能。ATP提供速度限制信息以保持列车间的安全间隔,使列车在符合限制速度的标准下运行。在打开车门前,ATP先检查各种允许打开车门的条件,检查通过后,才允许打开车门。
ATO子系统能自动调整车速,并能进行站内定点停车,使列车平稳地停在车站的正确位置。
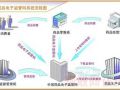
ATO从ATS处得到列车运行任务命令。其信息是通过轨道电路或轨旁通信器传送到列车上的。信息经过处理后传给ATO,并显示相关信息。ATO获得有用信息后,结合线路情况开始计算运行速度,得出控制量,并执行控制命令,同时显示有关信息。到站后,开门条件允许后,ATO打开车门。停站期间,列车通过车-地通信系统把列车信息传送给地面通信器,然后传到ATS。ATS根据列车信息,把运行信息传给车载ATO。ATO的工作原理图如图1。

图1 ATO工作原理图
2 ATO系统技术特点比较
20世纪90年代初,北京地铁1号线部分列车安装了英国Westinghouse公司的ATO设备(未使用);上海地铁1号线的ATO设备则是从美国GRS公司引进的,并于1996年11月开始在全线试用。广州地铁1号线引进的是德国Siemens公司的ATO设备,在1999年6月正式运营。由于他们的ATO系统设计不尽相同,因此有必要对不相同的地方进行比较(主要是ATO设备、ATO需求数据与传输通道和控制策略),然后分析各种设计的特点,以利于ATO的设备国产化。
2.1 北京地铁1号线ATO系统
1.ATO设备
车载设备:由设在列车每一端司机室内的ATO控制器及安装在列车每一端司机室车体下的两个ATO接收天线和两个ATO发送天线组成。
地面设备:在各车站设备室内设有站台ATO通信器PAC(PlatformATOCommunicator)。PAC内存有至下两个车站的线路信息,并通过与LPU或RTU接口,得到来自ATS子系统的控制命令。在各车站上下行站台以及进行ATO折返的折返线处轨道上,设有Xd或X2环路及Rd环路。列车在车站停车期间,经联锁电路及轨道电路的有关条件控制向室外环路发送。
2.ATO需求数据与传输通道
在ATO数据获取的过程中,车载ATP接收安全信息。安全信息由列车当前运行区段的AF900轨道电路传送,采用低频脉冲调幅方式,有8种不同的调制频率,6种用于ATP速度命令,2种用于门控命令。另外,车载TWC系统接收地面TWC信息。该信息一般是非安全控制功能数据,诸如运行等级、列车号、目的地和跳停等。该信息采用FSK调制方式,通过地面TWC设备向列车发送。最后,车载ATO接收来自车载ATP、TWC的信息和标志线圈的信息。
3.控制策略
速度调节:ATO根据从ATP中获取的MSS和TS,计算列车运行速度曲线。该曲线比较简单,主要计算加速转匀速、匀速转制动的位置点,以保证列车运行时不超过MSS,并且在每个轨道电路区段目标距离处速度不超过目标速度。控制器根据线路的情况自动控制列车的牵引及制动输出,尽量使列车按运行速度曲线的速度来运行。当列车速度超过目标速度时,ATP设备报警;当超过最大允许速度时,ATP实施紧急制动。
车站停车:在车站的定位停车是通过X2和Xd环路实现的。列车进入车站X2环路范围后,通过地-车之间的感应,得出距停车点的距离,进行第一次位置调整,并使速度尽量贴近预置的停车速度曲线。在Xd环路处,进行第二次也是最后一次位置调整。若需要对运行时间进行调整,ATS将给出控制命令,如惰行控制、扣车、下一 车站通过等命令,由ATO执行。
2.2 上海地铁1号线ATO系统[3]
1.ATO设备
车载设备:主要包括ATO主控制器,以及车底的ATP/TWC接收线圈、TWC发送天线(TWC为车-地通信子系统)、对位天线、标志线圈。
地面设备:包括每个车站ATC设备室内的车站停车模块以及沿每个站台布置的一组地面标志线圈。
2.ATO需求数据与传输通道
在ATO数据获取的过程中,车载ATP接收安全信息。安全信息由列车当前运行区段的AF900轨道电路传送,采用低频脉冲调幅方式,有8种不同的调制频率,6种用于ATP速度命令,2种用于门控命令。另外,车载TWC系统接收地面TWC信息。该信息一般是非安全控制功能数据,诸如运行等级、列车号、目的地和跳停等。该信息采用FSK调制方式,通过地面TWC设备向列车发送。最后,车载ATO接收来自车载ATP、TWC的信息和标志线圈的信息。
3.控制策略
速度调节:ATO与ATP配合调节速度。ATP共设6个速度命令,即20、30、45、55、65、80km/h。ATC系统具有4个ATS运行等级,对应于ATP的各个速度命令有相应的修正速度。参
车站停车:车载ATO系统将修正程序停车曲线,以符合所接受的运行等级。精确的车站停车是通过应用轨道电路ID和边界的转换以及车站的环线来实现的。应用轨道电路的ID来确定正确的停车曲线的起点。列车经过站外350m处的第一对地面标志器时,定点停车曲线便由此启动。定点停车曲线是建立在一个固定减速率基础上的。当ATS速度与定点停车曲线速度相同时,列车转入定点停车控制模式。列车经过150m、25m处的地面标志器时,它离开最后停车点的距离信息被不断更新。列车经过8m处的有源地面标志器上方,并收到由该标志器发送的信号,列车即刻转为定位停车模式,实施全常用制动,将车停住。车辆对位天线与地面对位天线对齐。
运行时间的调整:主要是通过选择不同的运行等级来实现。惰行模式已经包含在运行等级中。
运行模式的改变:ATC系统的逻辑要求是必须在列车停下时才可以进行转换,否则将导致一次紧急制动。
2.3 广州地铁1号线ATO系统[4]
1.ATO设备车载设备:主要包括ATC设备机架、速度表、
控制台、ATP接收天线、PTI发送天线。地面设备:包括车站交叉环线和PTI环线。
2.ATO需求数据与传输通道
由于广州地铁采用FTGS数字频率轨道电路,因此能传送报文信息。地面传送给列车的数据全部经轨道电路由车载ATP接收。ATO需要的信息主要通过车载ATP获得。包括经ATP处理过的信息(实际速度、运行方向、实际位置、列车长度、限速命令、制动减速度,附加信息:下一区段精调、停车位置、车站停车),以及ATS经过ATP传给ATO的信息(门控、到下一站的时间、车站号、车次号、目的地号、轨道电路号)。报文由所有类型的电码按照一定的次序组成,是由轨道电路循环发送的。
3.控制策略
速度调节:ATO接收到来自ATP的带四个标志点的速度命令信息(包括最大速度、第一限速、第二限速和入口速度的起点、终点、速度值),计算列车要求的运行速度。ATO按照时刻表和运行需要提供三种模式曲线:最大允许曲线,常规速度曲线(较最大速度曲线下降10%),节能速度曲线(较最大速度曲线下降20%);然后根据各种线路情况、车辆信息,计算所需牵引力或制动力,使列车到达要求速度。列车设定了最大加速率,以便列车平稳运行。控制算法中有一条警告曲线,总比ATP的最大允许速度曲线低一点。当超过警告曲线,则报警。
车站停车:车站内的位置调整点由多交叉的环路提供,如图2。环路的头和尾是所谓的环路边界。相对应地车站中间的环线交叉是用来确定距离的,一般的距离是6个枕木间距。另外还定义一些粗调点,它们间的距离减至3个枕木间距且四个一组。

图2 定点停车交叉环线
ATP车载设备能接收到这些交叉点,并把每个交叉点的处理信号传给ATO。ATO计算每个交叉点间的距离。粗调点只有在期望的位置窗口内才能被识别到。假如识别到粗调点,则下一个交叉点便可用作位置同步。这些交叉点的位置已预设在ATO中。
巡航/惰行是ATO的一项辅加功能。时间充裕的话,可以采用巡 航/惰行来调整运行时间,节省能源。
正线上改变运行模式:在列车运行中的任一时刻,司机可以通过移动操纵杆使之脱离零位,从而进行人工驾驶。在任何时候和任何驾驶阶段,ATO给出可以进行ATO驾驶的显示,司机通过移动操作杆,使之进入零位置并贝压ATO启动键,列车的运行模式变为ATO模式。
2.4 系统分析比较
以上三套系统中,以广州地铁1号线ATO系统运行效果最好,上海地铁1号线ATO系统次之。经过以上的分析比较发现:
从信息获取的角度来讲,北京采用车站ATO通信器,ATO只在站内获得信息,信息的实时性较差;上海地铁1号线通过轨道电路和轨旁TWC,广州地铁1号线通过轨道电路,均使ATO在运行时仍能接收最新信息。
从ATP限速模式来讲,北京地铁1号线与上海地铁1号线采用分级速度控制模式;广州地铁1号线则采用模式曲线速度控制模式。模式曲线ATP限速模式能使ATO控车更高效,更平稳。
从停车方式来讲,北京地铁1号线与上海地铁1号线采用的是点式模式,在固定位置处有相应的线圈;广州地铁1号线则采用连续模式,在站内铺设连续交叉环线,在定点调整距离的基础上,还能通过交叉环线脉冲跟踪
从运行时间调整来说,北京地铁1号线ATO根据ATS在车站给出的惰行命令来调整,ATO设备本身只是根据各种速度命令来执行操作;上海地铁1号线ATO则是通过ATS由轨旁设备给出运行等级命令,按相应的速度运行来调整运行时间;广州地铁1号线ATO能计算所要采用的运行等级,以便选用不同的牵引百分比实施控制,来调整运行时间。广州地铁1号线ATO还能计算惰行模式牵引力的切除点,以实现准时运行。相对来说,广州地铁1号线ATO对准时性的实现与运行时间的调整都比较灵活。
3 ATO系统车载设备的国产化研究
通过分析比较,对国产化ATO的设计要求如下:信息可通过轨道电路以报文的形式发送;限速模式可采用模式曲线方式;停车设备可采用铺设连续交叉环线;时间的调整要求能实时计算。
3.1 工作原理
以广州地铁1号线ATO系统为基础,结合实际情况,开发ATO系统车载设备。ATO从ATS处得到列车运行任务命令。该信息是与地面线路信息一起组成报文,通过轨道电路传送的,由车载ATP统一接收。ATP将经过处理的对ATO有用的信息传给ATO,并显示相关信息,且不断地监视ATO的工作。ATO获得有用信息后,根据实际运行速度和ATP的最大允许速度,计算运行速度,得出控制量并执行控制命令。巡航/惰行模块由独立的控制器来辅助完成。到站后,ATO通过PTI(车地通信发送天线)向地面发送列车信息,并传到ATS,以便识别列车的位置。ATS根据此列车信息确定列车的新任务后再次通过轨道电路传送给ATO。在区间运行时,每进入新的轨道区段,ATO便接收新的地面信息,以便进行速度调整。在运行过程符合ATO条件时,允许灵活地切换到ATO模式。
3.2 ATO车载设备的设计
ATO车载设备是ATO系统的核心部分,是设计的难点。以下分析一下ATO车载设备的接口。ATO的车载设备接口如图3。其中CCU为中央控制单元,通过总线控制着ATO、ATP、显示器间的数据通信;L1、L2为与ATO接口的显示灯;ATO与ATP间有多根信号线直接连接,包括系统激励线、ATO允许等等;E1到E10为与ATP接口的开关、按钮或显示灯,包括司机钥匙、ATO允许等等。地面信息全部由ATP接收天线接收;PTI为车-地通信发送天线。

图3 ATP车载设备接口
以上对我国现有的地铁列车自动驾驶系统进行了分析比较,并对列车自动运行系统车载设备设计的国产化工作略作介绍。相信不久,我国便能拥有自主开发的列车自动运行系统。