在纸机分部传动系统中, 多台电机的同步传动控制(无论交流传动还是直流传动) 问题是传动控制系统的关键, 它直接影响系统的可靠性和控制精度, 影响产品的质量和产量。尤其是对于高速纸机, 由于系统动态性能要求的提高和不确定因素的增多, 使得其同步传动控制问题变得更加复杂和困难。纸机的同步传动控制非常复杂, 具体表现在以下几个方面: ①系统变量多、参数多, 例如张力、速度、电流、电压、负载等; ②交流电动机的非线性; ③负载的不确定性;④多电机间性能的不匹配; ⑤多电机之间存在耦合。因此, 如何利用先进技术和先进设备来实现纸机同步传动控制, 获得最大同步传动速度, 提高纸的质量和系统运行的安全可靠性, 已成为造纸企业亟待解决的难题和研究热点。本文选用可编程计算机控制器(PCC-Programmable Computer Controller) 来组成分层递阶式交流变频网络控制系统, 大大节约了设计时间, 并提高了纸机传动控制系统通信速度与质量, 稳定性高, 实时性好且易于扩展。
1 纸机传动控制系统
传动控制是整个纸机控制的基本回路, 其必须完成速度链控制、张力控制, 并需考虑

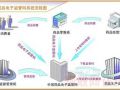
图1 分层递阶式控制系统结构示意图
PCC B&R 2005 采用模块化结构系统, 这种结构的特点是: CPU 为独立模块, 输入、输出、电源等也是独立模块。要组成1 个系统, 只须将所需的模块插入基板即可。它能通过现场总线PROFIBUS、CAN 组成控制网络, 也可以通过以太网ETHERNET 协议组成以太网控制网络, 组网非常方便。B&R 2005 带有操作系统, 更多的控制任务可以通过分时多任务处理, 增强了系统的实时性;其编程可以采用高级语言, 如C、Automation Studio Basic 等, 能实现复杂算法的编程。
纸机传动控制系统的组织级由上位工业控制计算机(IPC) 来实现, 完成整个传动控制的数据处理以及控制决策, 它与B&R 2005 通过ETHERNET 以太网接口相连。分层递阶式控制系统的协调级由B&R 2005来实现, 它与另外的负责辅助传动控制的B&R 2005通过PROFIBUS 相连, B&R 2005 的NW150 模块提供标准的PROFIBUS 接口。变频器、电机以及各种传感器执行分层递阶式控制系统的控制级任务。变频器通过CAN 总线挂接在控制网络中。B&R 2005 的IF671协处理器提供1个 RS232 接口、1 个RS485/ 422 接口和1 个CAN 接口。利用CAN 接口, 变频器通过CAN总线挂接在控制网络中。
2 速度链控制
根据造纸工艺要求, 纸机车速(v) 和抄纸定量(q) 之间存在下列关系:Δq/ q =Δv/ v (其中Δq 是定量容许公差范围, Δv 是纸机车速容许公差范围) 。为了保证纸的定量能够在许可公差范围之内, 要求纸机车速稳定, 速度只能在一定的许可范围内波动, 通常生产时, 纸机车速偏差Δv 不超过±( 1.5 %~1 %) , 纸板机车速不超过±(1.5 %~21 %) 。因此, 稳定的纸机车速能保证纸的定量稳定, 并避免断纸及其他一些问题。纸机各个分部的线速度随着纸的品种、抄纸速度、纸张水分含量等因素改变, 但在某一品种某一速度区, 各个分部间速度的比例基本不变, 纸机前后各分部间速度是一种比例协调关系, 如图2 所示, 前一分部速度是后一分部速度的Ki 倍。纸机传动还要保证能够准确地调整各个分部的速度。

图2 各分部速度比例分布示意图
纸机的速度链控制是整个传动控制的基本回路。旧式纸机用1 台定速式变速的交流电动机通过皮带轮、减速装置、齿轮等带动纸机各个分部。这就是通常所说的总轴传动方式, 现代化的纸机传动多采用分部传动方式, 即各个不同的分部都采用1 台以上的电机传动。针对17 个主传动点, 每台电机配备1 台变频器, 采用德国LENZE 公司的Lenze93 系列高性能变频器, 通过CAN 接口卡挂接在控制系统中。而且每台电机都带有每转产生1024 个脉冲的增量式光电编码器, 以完成速度反馈控制。
B&R 2005 通过检测各输入点的状态, 判断升速、降速、紧纸、松纸及是否微调, 并实现运行、爬行,以及单动、联动等控制。速度设定值由上位工控机设定, 通过B&R 2005 提供的过程可视化接口( PVI-Process Visualize Interface) 进入B&R 2005 ; 现场的增速、减速等信号由数字输入模块DI350 进入B&R 2005 , 通过B&R 2005 的内部计算补偿输出, 由CAN 总线进入变频器, 以达到调整变比的目的。
在分部传动中, 当前一分部的速度变化时, 不能影响其前面分部的速度, 只对后面分部的速度有影响。主传动的17 个传动点都是通过CAN 总线和B&R2005 相连, 它们组成17 个CAN 从站点, 编号从2 号一直到18 号, 其中1 号站点已经被作为CAN 主站的B&R 2005 所占用。在实现速度链时, 排好号的站点的速度变化只影响后面站点的速度, 这样通过CAN总线反映到各个传动点, 实现起来方便易行。由于使用了CAN 总线, 数据在系统中高速传输, 当速度给
由于卷纸部随着纸卷半径的逐渐增大, 整个辊的转动惯量也随之变化, 此时若用普通的PID 调节器,已经很难适应参数不断变化的需要, 所以此处选用模糊自适应控制。
3 负荷分配
纸机的同一分部若有多个电机时还得进行负荷分配控制。例如纸机的网部真空伏辊、驱动辊、第1 导网辊和光压上、下辊等, 各传动点之间要求速度同步的同时还要求负载均衡, 否则会影响正常抄纸。当负荷不能均匀分布时, 有可能撕坏毛布或造成断纸; 另外, 负荷分配不平衡可能会造成某一个或多个电机过负荷运转, 有时速度过快的电机会拖动速度较慢的电机, 增加了电机负荷, 影响电机寿命, 甚至会烧毁电机[4] 。所以有必要在各个分部中的各自传动点之间实施负荷自动分配控制功能。
传动控制要求各传动点电机负载率δ相同, 即
δ﹦Pi/ Pie(1)
其中Pi 为第i 台电机所承担的负载功率, P ie为第i 台电机的额定功率。但是在实际控制系统中, 由于电机功率是间接量, 难以测量, 所以多以电机定子电流代替电机功率。其算式如下:

其中Ili为第i 台电机的负载电流, Iei为第i 台电机的额定电流, Il 为负载总电流。
B&R 2005 通过CAN 总线从变频器中读取各个传动点电机的电流值, 其后进行计算处理, 经由CAN总线将控制变化量累加到原先的控制量上, 输出给各个变频器。另外, 各电机的电流通过B&R 2005 上传给上位工控机, 通过对电流的监视, 判断系统的运行状况。由于公式(2) 是简单线性化的结果, 若用在高速纸机中, 需要进行补偿运算处理。
4 张力控制
压光机、卷纸机和复卷机需要进行张力控制。张力控制的需求是由造纸工艺决定的。张力过紧会造成更多的断头和卷纸的锥形挤出; 张力过松会导致纸张塌陷, 影响纸的质量和纸机的生产速度[5] 。张力传感器将张力信号检测出来送到B&R 2005 的模拟量输入模块AI775 , 构成张力闭环控制以保持纸张的张力恒定。AI775 能接收0/ 4~20mA 的信号, 分辨率是12位, 其接收的信号经过标度转换和张力设定值运算后, 通过张力调节器, 并经过补偿运算叠加到速度设定值输入上, 以达到调节张力的作用。此处的张力调节器功能完全通过软件PID 模块实现, B&R 2005 操作系统自带的LoopCont 库中带有此模块, 只要设定比例积分和微分等时间常数并设定输出的上下限, 滤波时间常数等就可以直接使用, 不必去编PID 控制程序。张力控制如图3 所示。图3 中ATR 模块是张力调节环, 采用普通的PID 调节; ASR 是速度调节环,采用参数自调整模糊控制, 及时调整量化因子和比例因子, 达到精确调节的目的。

图3 张力控制功能示意图
5 软件编程
5.1 PCC 软件编程
B&R 2005 型PCC 操作系统是分时多任务操作系统, 它是系统软件的核心, 负责管理多个任务的并行执行。PCC 提供了8 个具有不同循环时间不同优先级别的任务等级, 用户可以根据实际需要, 为每个任务设定各自的循环时间和优先级别[6] 。本系统PCC 中共有4 个任务, 其任务等级如表1 所示。其中: 优先级最高的是任务1 , 负责完成现场数据如张力、定量等的采集; 优先级次之的是任务2 , 负责完成同步补偿控制算法和PCC 与现场控制设备之间的通信; 优先级再次之的是 任务3 , 负责完成数据显示, 对实时性要求不高, 但运行时间较长; 等级最低的是任务4 ,负责完成通信功能, 实现PCC 与工控机、人机界面等监控设备之间的通信, 要求尽可能地快。在B&R 2005 系统中, 采用分时多任务处理, 各任务的循环执行过程如图4 所示。

表1 系统各任务等级的选择

图4 各任务的循环过程
若本系统由普通的PLC 来实现, 各个任务都在同一个循环周期内, 由于用于显示的任务3 占用的循环时间较多, 导致整个系统的循环时间大于任务1 所要求的循环时间, 这就难以保证任务1 数据采集的实时性。而且如果用户有新的要求, 则需要改变整个程序。PCC 由于采用分时多任务处理, 解决了控制实时性的问题。它的各个任务可以通过软件挂起和投入运行, 给查错或增加新要求提供了便利, 而且可以实现复杂的顺序控制。
5.2 上位机通信编程
上位工控机采用B&R Provit 5000 , 它可以用VB、VC及Runtime 组建功能强大、图文丰富友好的上位人机界面; 或选用其他如组态王、开物组态软件等常用的组态软件, 这些软件
本程序的主监控界面有4 个, 包括主传动速度链控制界面, 辅传动控制界面, 实时曲线界面和报警记录界面。主传动速度链控制界面主要由17 个主传动点的速度、电流、电压等显示部分和整个纸机的控制信号如爬行、运行等组成。在主传动速度链控制界面中,点击各个传动点, 进入各传动点的数据显示和操作区。这部分包括: ①张力值设定和频率实际值显示。②频率值设定和频率实际值显示; 变频器的参数部分包括:站点号、参数值设定和参数值读取; 控制部分包括: 启动、停止, 正转、反转, 单动、联动, 改变、禁止等。要改变变频器参数时必须先按“改变”控制按钮, 应用程序才允许用户改变参数。若不想随便改变参数和频率, 按下“禁止”按钮即可封锁所有针对参数的操作。如果应用程序在进入时设置密码管理部分, 可实现监控和管理的安全。辅传动控制界面基本上和主传动控制界面相似。实时曲线界面是各种实时曲线, 可以通过这些曲线监视系统的稳定性。报警记录界面主要记录和显示各种报警事件, 并显示相应的原因, 给检修提供依据。上位工控机和下位B&R 2005 的数据交换通过PVI 接口, 其数据传输过程如图5 所示。

图5 实现变频器在线监控过程
6 结语
分层递阶式控制系统和先进控制器PCC B&R 2005 的应用, 成功实现了纸机高精度的同步控制,达到了控制和管理的目的。这种分层递阶式控制系统结构清晰, 责任明确; B&R 2005 不仅具有系统的高速响应, 而且采用定性多任务分时操作系统, 使整个系统得到了优化, 具有较好的实时性, 易于实现; 使用现场总线网络, 稳定性高, 数据传输快, 提高了控制精度。