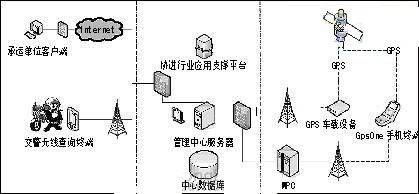
GPS是Global Positioning System的缩写,即全球定位系统。其目的是在全球范围内对地面和空中目标进行准确定位和监测。随着全球性空间定位信息应用的日益广泛,GPS提供的全时域、全天候、高精度定位服务将给空间技术、地球物理、大地测绘、遥感技术、交通调度、军事作战以及人们的日常生活带来巨大的变化和深远的影响。
目前的民用GPS设备包括测量型和导航型。其中测量型产品的精度可达到米级甚至毫米级,但至少需要两台(套)才能达到设计精度要求,而且其内部结构复杂,单机成本一般在几万到几十万,适合专业高精度测量环境使用;导航型产品,由于其使用者对精度要求不高,一般为几十米,因此机器内部硬件相对简单,只须一台就可以完成导航工作,加之其价格相对较低,因而更有普及和推广价值。
GPS系统一般由地面控制站、导航卫星和用户接收机三大部分组成。导航卫星至少24颗,均匀分布在6个极地轨道上,轨道的夹角为60度,距地平均高度为20200公里,每12恒星时绕地球一周。

GPS信号接收机的任务主要是捕获一定卫星高度截止角所选择的待测卫星的信号,并跟踪这些卫星的运行,同时对所接收到的GPS信号进行变换、放大和处理,以便测量出GPS信号从卫星到接收机天线的传播时间,解译出GPS卫星所发送的导航电文,最终实时计算出现测站的三维位置、位置、甚至三维速度和时间。
静态定位时,GPS接收机在捕获和跟踪GPS卫星的过程中固定不变,接收机通过高精度测量GPS信号的传播时间,并利用GPS卫星在轨的已知位置解算出接收机天线所在位置的三维坐标。而动态定位则是用GPS接收机测定一个运动物体的运行轨迹。GPS信号接收机所在的运动物体叫做载体(如航行中的船舰,空中的飞机,行走的车辆等)。由于载体上的GPS接收机天线在跟踪GPS卫星的过程中将相对地球而运动,这样,接收机用GPS信号就可实时地测量运动载体的状态参数(瞬间三维位置和三维速度)。
接收机硬件、机内软件以及GPS数据的后处理软件包构成了完整的GPS用户设备。GPS接收机的结构分为天线单元和接收单元两大部分。对于测地型接收机来说,两个单元一般分成两个独立的部件,观测时将天线单元安置在测站上,接收单元则置于测站附近的适当地方,并用电缆线将两者连接成一个整机。实际上,也可以将天线单元和接收单元制作成一个整体,而在观测时将其安置在测站点上。
GPS接收机一般用蓄电池做电源,同时采用机内机外两种直流电源。设置机内电池的目的在于更换外电池时不中断连续观测。在用机外电池的过程中,机内电池自动充电。关机后,机内电池为RAM存储器供电,以防丢失数据。
2、TU-30 GPS模块简介
TU-30模块是美国罗克韦尔公司的GPS产品,其特点是体积小、接口简单、可靠性好。模块的组织结构是一个用于接收GPS信号的单片机小系统。GPS信号接收部分由Rockwell自行设计开发的芯片及其外围电路组成。其控制内核是一个DSP处理器,该处理器具有很强的数据运算处理能力,并有两个串口和时钟输出;外围电路有实时时钟,并带有E2PROM(保存重要参数)、SRAM、ROM等存储器,可对相关重要信息数据进行存储、交换;此外,还留有DGPS接口。该模块的卫星采集启动方式分为4种模式:热启动方式、初始启动方式、冷启动方式、冻结启动方式;而导航模式则有3维模式、2维模式和DG-PS模式s种。图1所示是该模块的硬件结构。
TU-30 GPS模块留有天线接口,可以用同轴电缆与天线进行连接,天线可延长30米。此外,它还留有20Pin应用接口,可方便地与单片机、PC机等设备进行接口。
表1 TU-30 GPS的模块中的20针接口定义
| 接 口 | 功 能 |
| Pin1 | 前置放大电源输入 |
| Pin2 | 5V电源输入 |
| Pin3 | 电池电源输入 |
| Pin5 | 主复位输入 |
| Pin7 | NMEA协议选择 |
| Pin8 | ROM默认选择 |
| Pin11 | 串口1数据输出 |
| Pin12 | 串口1数据输入 |
| Pin14 | 串口2数据输出 |
| Pin15 | 串口2数据输入 |
| Pin19 | 1PPS时间标志输出 |
| Pin20 | 10kHz时钟输出 |
| Pin4,6,9,17 | 无连接NC |
| Pin10,13,16,18 | 接地 |
3 GPS模块的串行数据接口规范
GPS模块的应用关键在于串口通信协议的制定,也就是模块的相关输入输出协议格式。它主要包括数据类型与信息格式,其中数据类型主要有二进制信息和NMEA全国海洋电子学会 数据信息。这两类信息可以通过串口与GPS接收机进行通信。这里重点介绍TU-30的二进制信息字格式与字结构。TU-30的传输速率为9000pbs,无奇偶校验,有8位数据位,1位停止位。其二进制信息字格式包括信息头、头校验、数据、数据校验等。
TU-30中的每个信息都有头,但不一定有数据,信息的应答和请求以头的形式完成。二进制信息头通常由如下五个字组成:
Word1:1000 0001 1111 1111;
Word2:信息ID;
Word3:数据子计数;
Word4:应答/无应答;
Word5:头校验。
头校验计算公式为:

一般情况下,二进制信息数据由如下4个字组成:
Word6:触发;
Word7:间隔;
Word8:偏移量;
Word9:数据校验。
头校验计算公式为:

TU-30中的每个字均为16位,有无符号整型和有符号整形之分。按字长又可分为单精度(16bit)、双精度(32bit)和三精度(48bit)。保留位输入时为0,独立定义位域标志位时可为0或1。
TU-30中的输出信息如下:
信息位置状态输出(经度、纬度、时间、高度等);
信息ID为1000,信息长度为55个字;
ECEF 状态输出:信息ID为100,信息长度为54个字;
通道摘要信息ID为1002,信息长度为51个字;
通道测量信息ID为1007,信息长度为154个字;
…
用户设置输出:信息ID为1012,信息长度为22个字;
内建测试结果:信息ID为1100,信息长度为20个字;
测量时间标记:信息ID为1102,信息长度为253个字;
串口通信参数:信息ID为1130,信息长度为21个字;
EEPROM 状态: 信息ID为1136,信息长度为18个字。
下面是TU-30的输入信息描述:
测量位置和速度初始化:信息ID为1200,信息长度为27个字。现以此为例来介绍各信息字的具体含义:
字1~4:信息头;
5:头校验;
6:序列号;
7:初始化控制;
8~16:GPS时间、日期;
17~18:纬度;
19~20:经度;
21~22:高度;
23~24:对地速度;
25:卫星轨道仰角;
26:爬升率;
27:数据校验。

下面是TU-30的其它信息,其具体内容可参见相关文档。
用户数据定义:信息ID为1210,信息长度为20个字;
地图选择信息数据:信息ID为1211,信息长度为8个字;
卫星仰角屏蔽控制(0~±л/2):信息ID为1212,信息长度为8个字;
卫星选择 : 信息ID为1213,信息长度为10个字;
差动GPS控制:信息ID为1214,信息长度为9个字;
冷起动控制: