随着企业规模的扩大和Internet技术的广泛普及,全球各个领域的不同企业已经对“让设备联网”达成共识,而在工业控制和通信设备中,更多的却是符合RS232标准的串行口设备。如何将多个串行口的数据转发到网络上,实现设备的远程控制、数据的远程传输便成了一个亟待解决的问题。同时,考虑到成本问题,以往设备又不可能全部淘汰,因此,本文提出一种基于TCP/IP的多串口转换网关,可从根本上解决这一难题。
多串口转换网关使得串口数据流到以太网数据流的传输成为可能。它能连接多个RS232串口设备,并将串口数据进行选择和处理,把RS232接口的数据流转化成以太网数据流,这样就可以进行网络化的数据处理,实现串行数据的网络化。采用此种方案,无需淘汰原有串口设备,多台设备可同时入网,既可以提高设备利用率,又节约组网费用,还可在已有的网络基础上简化布线复杂度。采用串口扩展芯片GM8123可实现低成本、较高速度、控制简单的多串口方案。
1&nbs
p; 系统应用方案
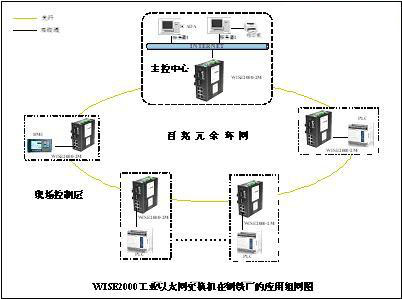
在企业自动化系统中,上层企业管理层和生产监控层一般都采用以太网和PC机,而下层车间现场多是RS232串口的测控设备。本文提出的多串口转换网关,能够方便实现上下两层的沟通。 可连接多台串口设备是本系统最大的特点,避免了为每台设备配置一个网关带来的成本较高、组网复杂的弊端。
2 系统结构
TCP/IP协议由应用层、UDP层、IP层和数据链路层组成。为了实现透明传输,增加应用进程协议层——串口层。串口层由串口链路层和串口网络层构成。网关在串口层构建,同时解析RS232数据包,并作为TCP/IP网络应用层的数据传输。多串口网关由TCP/IP协议转换模块和多串口收发控制模块组成,结构如图1所示。
点击看原图 它是一个微型的以太网接入模块,由微控制器(MCU)、网卡接口芯片、EEPROM 93C46、片外512 KBSRAM芯片IS6lLV5128以及辅助元件构成。微控制器控制网卡接口芯片进行网络通信,实现地址解析协议(ARP)、Internet控制报文协议(ICMP)、IP协议、用户数据报协议(UDP)等协议的解析和封包。将以太网发送缓冲区的串口帧封装在UDP包中,并传给IP层;同时,接收以太网数据帧并向上层层解包,分离应用层数据,然后数据的解析处理交由多串口发送模块完成,实现RS232串口流与以太网端口流的透明转换。 实现多个RS232串口数据流的收/发控制,包括微控制器、串口扩展芯片(GM8123)、MAX232等元件。微控制器控制GM8123完成多串口数据收发,接收多个串口源数据,封装后写入以太网发送缓冲区打包传输;同时,接收以太网应用层的数据,解析并发送给测控设备。它不关心通信数据的具体意义,只负责接收/发送,封装/拆封串口帧,提供通用接口。 3 多串口实现 3.1 实现方案——采用串口扩展芯片 在微控制器中有2个UART的基础上,采用GM8123,系统能提供2组(UARTO、UARTl)共4个串行口(COM1、COM2、C0M3、COM4),利用两级优先级控制UARTO和UARTl的中断请求且允许嵌套。在UARTO的中断例程内部,通过查询方式确定数据源是哪个子串口。 点击看原图 3.2 多串口扩展芯片——GM8123 GM8123可将一个全
(1)TCP/lP协议转换模块
(2)多串口收发控制模块 


当两组串口同时有数据请求时,首先,MCU的中断机制判断中断请求的优先级,对优先级高的中断请求优先响应。系统对优先级分配:UART0为2,UARTl为1,即MCU优先响应UART0的中断请求。当UARTO的3个子口同时有数据请求时,通过轮询方式,对各个子口予以响应,即按照子口号的地址由小到大进行响应。这样,就形成了2级中断和4个串口的多串口实现方案。
①采用写控制字的方式对芯片进行控制,控制简单;

②数据格式10位或11位可选;
③拥有3个子串口.且各子串口波特率可调(统一调节);
④两种模式(单道模式和多道模式)可通过1根引脚控制;
⑤在多通道工作模式下,各子串口的波特率等于母串口波特率的4分频;
⑥在多通道工作模式下,接收时地址线SRADD1~0向MCU返回接收子通道的地址,MCU接收到母串口送来的数据后,就可根据SRADDl~0状态判断数据是从哪一个子串口送来的,发送时先由MCU选择子串口再向母串口发送数据;
⑦与标准串口通信格式兼容,TTL电平输出;
⑧每位采样16次,提高数据正确性;
⑨宽工作电压为2.3~6.7 V。
⑩输入地址引脚有50~80 kΩ下拉电阻,其他输入引脚有50~80 kΩ上拉电阻(OSCI除外)。
3.3各串口的特点及应用分析
系统中两组串口利用的资源不同,在速率上它们之间存在差异。串口COMl、COM2和COM3通过GM81

GM8123工作在多道模式,各子串口必须设置统一波特率,不适用于各串口设备工作波特率不一致、又要求同时工作的场合,这也是该芯片的不足之处。实际应用中,COM1、COM2和COM3应该连接类型、速率相同的设备。COM4的波特率可以根据需求具体配置,这样,系统的4个串口从速率上可以形成两种应用方案:一是4个串口配置相同波特率;二是每l组配置1个波特率值。
点击看原图 4 工作原理 4.1 帧的统一化 系统4个串口源的数据要作为以太网帧的一部分,为了向设备提供透明的接口和区分数据源,需要制定统一的帧格式。帧格式如图2所示,其中串口号字段用来区分数据源;帧头、帧尾作为一个串口帧的起始分界(可自定义);数据部分是来自串口的原始数据流。同样,网口发送数据也要有一致的帧格式,如图3所示。显然,串口帧是作为UDP层的协议数据进行传输的。 4.2系统数据流向分析 多串口转换网关,实现多个串口和一个网口间的数据转换,关键是多个串口数据如何送到网络上、网络数据又怎样转到多个串口。其中,串口链路层完成串口数据收发功能,串口网络层作为TCP/IP应用层的一部分,实现串口帧的封装。发送是入协议栈的过程,如图4所示,接收是出协议栈的过程(图略),不同之处在于对数据的收/发处理。 多串口到网口的数据转换传输:串口链路层,接收来自测控设备的数据,交给串口网络层,该层完成串口数据帧的封装并放入以太网的发送缓冲区。当系统规定的UDP打包时间到或已经有4个串口数据帧时,打UDP包,并逐层下送,直到把数据送上物理介质,完成比特流的传输。 图6说明了多串口数据帧等待打包传输的过程。 &
综上所述,系统提供了由2组4个串口、两级优先级控制、2种波特率配置方案构成的多串口实现方法。
为了能一次传输尽量多的数据,系统对数据长度作了严格定义:串口数据帧的数据段最大长度为300个字节;网口发送帧的数据段最多允许4个串口数据帧。同时,还要满足具体应用对实时性的要求:对每一个串口规定一个最长响应时间。时间到时,不管是否已接收:300个字节都要对串口数据进行封装,并放人以太网发送缓冲区;同时,为了避免系统由于等待以太网发送缓冲区串口帧数达到4,而造成串口数据不能实时发送,要求在一定的时间内进行一次以太网通信,而不必等待4个串口帧到齐才打包传输。
这样,系统对数据容量和时间的双重规定,能保证具体应用对实时性的要求,并能一次传输尽量多的数据,降低了由于时间上的“空等”造成系统实时性差的可能性。4个串口在串口层完成的功能是相同的,仅以COMl为例,给出串口层上数据流,如图5所示。
结语
本文介绍基于TCP/IP的多串口转换网关,采用GM8123芯片增加了串行口数目,适合要求入网串口设备多的场合。借助于该多串口网关,可方便的实现串口设备和监控层的透明数据通信,实现设备的网络化控制与信息的分布式管理,必能广泛的应用在基于以太网的分布式测控网络中。