CAN总线网络是炙手可热的技术
CAN总线网络的问世已超过15年,它是德国Bosch公司及几个半导体集成电路制造商开发,芯片由摩托罗拉、Intel等公司生产。起初是专门为汽车工业设计的,面向需要可预测而无错误通讯的汽车应用,目的是为了节省接线的工作量,后来由于自身的特点被广泛地应用于各行各业。特别是近年来,由于价格不断下降,CAN成了炙手可热的技术,并不再局限于汽车应用领域。目前它正在工业网络、医疗设备、轨道交通信号、楼宇控制及其它众多系统中得到

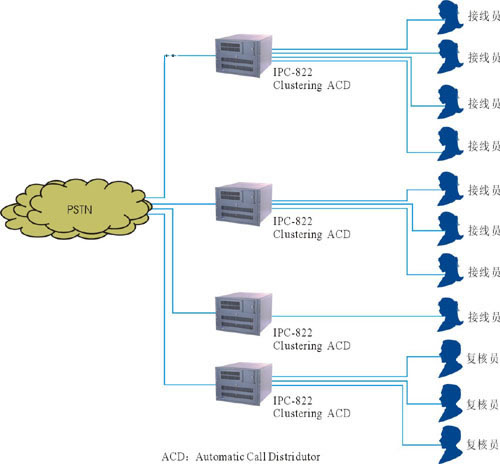
图1:CAN 总线网络多主机系统-分布式网络(图右所示)
与以太网-集中式网络(图左所示)之比较
图2:为基于 CAN 总线网络的光电经纬仪通信结构框图 牢靠而高速的通讯
上述众多应用领城系统之所以采用CAN总线网络,不仅因为其成本低廉,还由于通过这种网络可进行牢靠而高速的通讯。CAN总线可采用双绞线、同轴电缆或光纤作为传输介质;它的直接通信距离最远可达10km,通信速率通信比特率可高达1Mbps(此时通信距离为40m);总线上可挂设备数主要取决于总线驱动电路,最多可达110个。
CAN总线网络是一个多主机系统
CAN采用多主工作方式,节点之间不分主从,但节点之间有优先级之分,通信方式灵活,可实现点对点、一点对多点及广播方式传输数据,无需调度。也就是说,它可向系统中的所有节点进行报文发送广播。在这种网络中,每个节点均可滤除不需要的报文。
与以太网之区别
传统的客户机/服务器网络(如以太网)依赖于网络寻址方式将数据发送到单一节点上,如果网络中存在多个节点,则需用星形配置实现集中控制(见图1左所示集中式网络)。这种以太网络中只需较少的单片机即可执行各种不同的任务,但所使用的是MCU(多芯片单元),通常需要有较多引脚,而且功能也更加复杂,很不方便。
与之相反,CAN系统中的每个节点均同时接收到同样的数据。缺省情况下,CAN是基于报文而非地址的。系统采用分布式控制实现方法集成了多节点(见图1右所示分布式网络)。这种拓扑结构的好处之一是,节点的增加和去除非常简单,对软件的影响也很小。CAN网络要求每个节点均具备智能,但智能化水平可根据节点所承载的任务进行调整。因此CAN系统中使用的单片机通常较简单并且引脚数也较少。由于使用的导线较少并且采用分散式智能,而且CAN网络还具有较高的可靠性。
图1进一步显示了在多任务网络中,集中式网络通常用于以太网系统,如果在系统中增加节点,则要求对系统MCU(多芯片单元)作很大的变动;而CAN网络可实现分布式网络,从系统中增加或删除节点只需改变少量的固件。
CAN采用的是非破坏性总线仲裁技术,按优先级发送,可以大大节省总线冲突仲裁时间
而以太网在于它在发送结束前进行冲突检测。而CAN在发送开始时采用冲突检测并有解决方法。当同时发送的两个或更多CAN节点在仲裁期间出现冲突时,报文优先级较低的节点会检测到冲突。随后优先级较低的节点切换到接收模式,等待下一次总线空闲才再次尝试发送。
仲裁成功的发送器将继续如常发送报文,由于在报文仲裁期间,模式的变更在发送的一开始就发生了,而优先级高的报文没有遭到破坏,因此系统对冲突的仲裁结果能做出更快的回应。报文标志符可达2032种,而扩展标准的报文标志符几乎不受限制。
目前CAN已由ISO TC22技术委员会批准为国际标准,在现场总线中,它是唯一被国际标准化组织批准的现场总线。CAN协议也遵循ISO/OSI模型,采用了其中的物理层、数据链路层与应用层。由Bosch公司负责编写的CAN总线网络技术规范已通过ISO和SAE标准化。完整的CAN规范标准参见ISO 11898-1。ISO 11898-2包含了CAN物理层规范。
CAN总线上的通信结构与实现
CAN采用短帧结构传输,每帧有效字段为6-8个,传输时间短,受干扰的概率低。而且每帧信息都有CRC校验和其他检错措施,保证数据出错率极低。当节点严重错误时,具有自动关闭功能,使总线上其他节点不受影响。可见,CAN是所有总线中最为可靠的。 
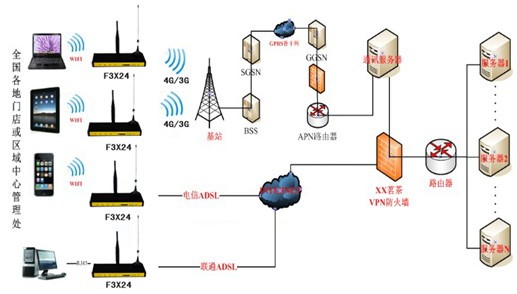
图3:基于 CAN 总线网络的病理监控系统(或远程
CAN 总线网络的病理监控系

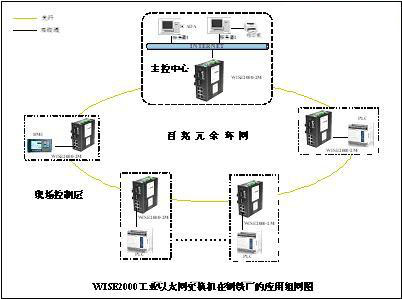
图4:FCS 结构与DCS 结构之不同 CAN总线上的通信是通过报文帧来实现的。帧有三种类型,即数据帧、远程帧和错误帧。每一个帧内部都具备一些字段,对发送的帧类型做出定义并提供相关信息。比如,数据帧由6个字段组成,分别是:仲裁字段、控制字段、数据宇段、CRC(循环冗余校验)宇段、确认字段以及帧结束。在帧发送期间,仲裁字段被网络中的每个节点用来识别和/或解决冲突。仲裁字段还用来识别报文的类型及其发送目的地。控制字段定义了数据帧的长度。数据帧包含数据,其字节数在控制宇段中作了规定。CRC字段用来检测数据错误。最后,每次发送均需取得CAN网络上所有接收节点的确认帧。
CAN网络应用举例
基于CAN总线网络的光电经纬仪通信方案
经纬仪系统为何要用CAN总线网络来实现?
先简介经纬仪功能:利用激光、红外、电视、雷达等探测器获得运动目标在其视场内与视场中心的变化偏差,再将他通过伺服控制系统进行校正跟踪,使仪器瞄准该目标并引导其他跟踪设备或根据激光测距和仪器本身位置数据计算出运动目标的精确轨迹。
经纬仪系统风险是主控制机要负担大量的数据计算和交换任务,控制功能不能分散,导致任务风险
基于CAN总线网络的光电经纬仪结构特征,其框图如图2所示。
结构特征:使用单一的串行总线结构代替了多种通信方式的并行结构。主控制机所需信息可以从CAN总线上取得,图像处理、位置元。其它数据采集等分系统通过CAN总线与主控制机交换数据的同时还可以从总线上直接获取其他分系统的数据,这不仅提高了总线利用率、数据传输的实时性还减轻了主控制机的压力、提高了系统工作的稳定性。所有的分系统都可以通过一对双绞线串接在一起,节省了空间、简化了布线。由于CAN总线本身所具有的突出特性,设备的抗干扰性、可靠性、实时性等几项指标均能得到提高。
CAN总线在医疗器械上的应用——病理分布式监控系统(或病理远程式监控系统)
病理分布式(或远程式)监控系统分别由中央控制式的中央监控单元和现场采集单元(或远程采集单元)组成见图3所示。现场采集单元对医院各室诊断测量仪器(或设备)进行数据、图像的实时采集,同时完成数据统计、存贮;中央监控单元可以定期或不定期地从现场采集单元获取数据并完成图像监测、数据统计、报表、打印及数据库管理。中央监控单元和现场采集单元之间通过CAN总线连接在一起,在这个网络中,中央监控单元处于主控位置,而现场采集单元可以随时响应中央监控单元的命令。其现场采集单元由单片机8C552及采集、存储、显示、遥控和通信模块组成,每个现场采集单元可与10个测量仪器(或设备)相接。
该病理分布式监控系统可拓宽为病理远程式监控系统,可以监控一个都市内的各大医院或几个城市的中心医院。
基于CAN的现场总线控制系统(FCS)
基于CAN总线结构性能,可以拓宽出应用CAN的现场总线控制系统(FCS)所具的优越性,即大大提高了准确性与可靠性。
由于现场总线设备的智能化、数字化,与模拟信号相比,它从根本上提高了测量与控制的精确度,减少了传送误差。同时,由于系统的结构简化,设备与连线减少,现场仪表内部功能加强,减少了信号的往返传输,提高了系统的工作可靠性。此外,由于它的设备标准化,功能模块化,因而还具有设计简单,易于重构等优点。
为此,通过图4所示可以对该类应用CAN的现场总线控制系统(FCS)与集散控制系统(DCS)作出比较,进而说明FCS的优点。在图4中,可看出其FCS打破了DCS的结构形式,这是因为:第一,FCS采用了智能设备,把原先DCS系统中处于控制室的控制模块、输入/输出模块置于现场设备中,实现了彻底的分散控制;第二,采用数字信号代替模拟信号,可以实现一对电线上传输多个信号,同时可以为多个设备供电,这样为简化系统结构、节约硬件设备、节约连接电缆与各种安装、维护费用创造了条件。
结论
CAN总线性能经过时间考验,确保了在需要安全保障的应用环境中能进行可预测而无错误的通讯。它能通过仲裁划分报文的优先级。其硬件和数据链接层的配置灵活,设计时可对许多发送细节进行更改,而更改后整个系统的数据一致性仍然能够得到保证。当然CAN不足之处是不能用于防爆区。
文章编号:060916
发送短信“ 文章编号+ 评语代码” 至13816124995,告诉我们您对此文的意见。
1- 很好,有很高的参考价值
2- 一般,有一定的参考价值
3- 不好,没有参考价值