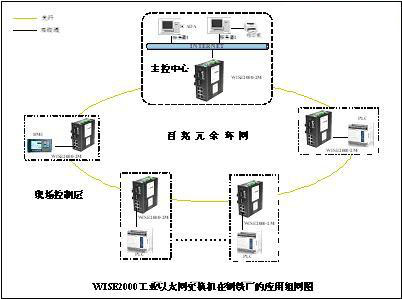
0、引言 在上图中,I1占、E1、E2、C1、C2均为Intelligent Agent单元,I1、I2为智能仪表,它们负责信号采集及预
现场总线的出现促进了现场设备的数字化和网络化,并且使现场控制的功能功咿大。它基本上可以很好地解决DCS所存在的问题。基于现场总线产品的控制系统(FCS)将是工业现场控制系统的发展方向。不过目前统一的总线通讯协议尚未形成,虽然现场总线在其它领域应用较多,如:智能建筑,但是在现场控制系统中应用的并不是十分广泛。
针对目前控制系统中存在的问题,考虑到长远发展趋势和实际情况,国内已经提出现场总线和DCS网络集成的现场控制系统。同时,许多生产厂家推出了远程智能I/O装置,作为DCS向FCS发展的中间过度产品。
但不管怎样改进,其控制系统的可靠性都是通过单个设备的可靠性和关键部件的冗余来实现的。有鉴于此,我们借鉴了分布式人工智能领域中智能代理协同工作的思想,提出一种基于IA(Intelligent Agent)思想的现场总线控制系统的研究思路。本文就该思路的学术构想、有关IA理论及其基于IA思想的现场总线控制系统的工作原理和实施方案进行了探讨。
&nb
sp; 1、IA有关理论
随着计算机网络及其基于网络的分布计算技术的发展,智能Agent技术已经成为人工智能领域一个新的研究热点。那究竟什么是Intelligent Agent呢?
广义的Intelligent Agent包括人类、物理世界里的移动机器人和信息世界中的软件机器人。狭义的Intelligent Agent是指信息世界中的软件机器人或机器。具体地说,能完成一定任务的一台计算机就可算是一个Agento它是代表用户或其他程序,以主动服务的方式完成一组操作的机动计算实体。这里讲的“主动服务”有两层含义,一方面是指主动适应:即在完成操作的过程中,利用关于操作对象的知识以及关于用户意图和偏好的知识;另一方面是指主动代理:即对一些任务无须用户发出具体指令,只要当前状态符合某种条件,就可以代表用户或其他程序完成相应的操作。
Intelligent Agent具有以下一些特性:
(1)代理性(Agent);
(2)智能性(Intelligent);
(3)自主性(Autonomy);
(4)移动性(Mobility)。
一个系统中一般有多个Intelligent Agent,这样的系统就称为多Agent系统。多Agent系统必须找出一种使各个Agent能够协同工作的适当方法。这种方法是建立在多个Agent系统资源共享和各Agent自主性之上的。虽然独立的Agent有各自分散的目标、知识和推理过程,但它们之间必须有一种方法能够相互协调、相互帮助以找到整个系统的目标。这样,多个Agent完成整个系统目标的过程便称为多Agent之间的协作及协商[刻。它一直是多Agent系统研究的核心问题。它的实现涉及到多Agent系统的组织结构、通信、开发方法和智能体编程语言等问题。
在此,我们最关心的是多Agent系统之间的通信。它包含3个方面的内容:通信范式、通信协议和通信语言。多Agent系统的通信范式有共享全局内存、消息传递及二者的结合。它的通信协议包含3种含义:网络传输协议、高层交互行框架和对所交换的通信原语的约束。至于多Agent系统之间的通信语言有以下要求:形式简单,易于理解,语法可开展,方便与其它系统集成,内容具有层次性,语义规范,能保证Agent间通信的可靠性和安全性等等。
2、系统原理与实现方案
根据以上Intelligent Agent协同工作的思想,我们提出了一种基于IA思想的现场总线控制系统。
何谓基于IA的现场总线控制系统呢?即在一个现场总线控制系统中,各个控制节点、智能仪表为具有一定智能的自主代理,它们具有Intelligent Agent的一些特性,通过它们之间的协同工作来实现多Agent之间的协作及协商思想,从而共同完成整个控制系统的任务,以提高系统的可靠性和稳定性。
在传统的DCS系统中,计算机和各个智能仪表便可以构成了一个个Intelligent Agent单元。我们在采用现场总线作为网络结构的基础上,提升网络中所连接的智能仪表、控制器等的功能,加之一定软、硬件就可以将其设计成为一个个Intelligent Agent。基于IA思想的现场总线控制系统的工作原理大致可用图1来简单说明。 
在传统的DCS或FCS系统中,整个系统的可靠性是建立在关键部件控制器C1和C2的身上。一旦C1或C2出现故障,则它们所负责的控制节点便瘫痪。为了确保整个系统的可靠性,一般需要给控制器C1和C2作一备份控制器。这样一来,整个系统的工程造价便变得十分昂贵,性能价格比低下。
而基于IA思想的总线控制系统又是如何工作的呢?
正常工作情况下,控制器Cl从智能仪表I1接收现场信号,并负责执行机构E1的控制任务;控制器C2从智能仪表I2接收现场信号,并负责执行机构E2的控制任务。两个小系统之间互不干扰,相互独立地工作。当事故发生时,例如:C1出现故障,I1不能接收到C1的存在信号,便确认CI出现故障,于是将现场信号传送给控制器C2;C2在完成其正常的工作情况下,承担起C1的工作,使整个系统仍能正常地运行工作。当C1恢复正常以后,I1停止向C2发送现场信号,C1重新把控制任务
另外,由于各个控制节点之间可以任意通信,当面对复杂的控制任务时,可以通过多个控制器代理来协同完成该任务。
实现该控制系统的具体方案如下:
考虑到本系统降低成本的要求,结合现有总线控制系统的特点,以CAN总线作为整个系统的通信平台。在此,我们只要在设计每个Intelligent Agent的时候,给每个模块加上CAN通信控制器芯片和CAN总线收发器芯片,通信线路只需普通双绞线即可,这样便可实现各个Intelligent Agent之间的任意通信。同时以单片机系统作为硬件支撑,用C51语言作为软件开发工具,使其与传统的传感器和执行机构构成智能信号检测代理和智能执行代理,从而构成整个基于IA的自动控制系统。
总的来说,与现存的各种现场总线控制系统相比较,该系统具有以下优点:
(1)不同于现有控制系统通过单个设备的可靠性和关键部件的冗余来提高整个系统的可靠性的做法,依靠各个智能代理之间的合作来提高可靠性。这样,单个智能代理的可靠性不一定高,但整个系统
的可靠性很高。
(2)整个控制系统在处理系统故障等异常突发事件方面具有智能性。具有智能的自主代理知道在什么情况下将信息传送到何处,该做何种处理,处理功能具有智能化。
(3)系统的性能如可靠性和快速性可以具有很好的扩展性。在现场总线上可以增加控制器代理或其他信息处理代理,并在系统中注册。这样,对于复杂的任务可以通过多个代理的协同工作来完成。
3、结论
本论文的研究是在Intelligent Agent的理论基础上,针对当今各种现场控制中存在的不足,进行改进尝试。目前本研究项目已经完成硬件平台和软件的设计调试工作,正处于系统调试阶段。期望最终实现具有成本低、可靠性高、智能化等特点的现场总线控制系统。