新兴工业时代,上下料机器人能满足“快速/大批量加工节拍”、“节省人力成本”、“提高生产效率”等要求,成为越来越多工厂的理想选择。上下料机器人系统具有高效率和高稳定性,结构简单更易于维护, 可以满足不同种类产品的生产, 对用户来说, 可以很快进行产品结构的调整和扩大产能, 并且可以大大降低产业工人的劳动强度。

机器人特点
1.可以实现对圆盘类、长轴类、不规则形状、金属板类等工件的自动上料/下料、工件翻转、工件转序等工作。
2.不依靠机床的控制器进行控制,机械手采用独立的控制模块,不影响机床运转。
3.刚性好,运行平稳,维护非常方便。
4.可选:独立料仓设计,料仓独立自动控制。
5.可选:独立流水线。
机器人分类
关节式机器人
1.机器人最大工作范围(回转半径):620mm-3503mm
2.机器人负载能力:3kg-700kg
3.机器人工作节拍:大于等于3秒
4.定位精度:±0.1mm
5.驱动形式:全伺服驱动
6.手爪驱动:气动或者电动,根据工件不同定制,自动换爪功能
7.编程方式:示教编程, AS语言编程
8.料仓/输送线:根据工件不同定制
直角坐标机器
1.机器人工作范围
水平行程:1000mm-20000mm
垂直行程:200mm-3000mm
工件旋转:±180度
2.运行速度:
水平运动最大速度:3000mm/s
垂直运动最大速度:1000mm/s
3.定位精度:
水平运动重复精度:±0.1mm
垂直运动重复精度:±0.1mm
4.传动形式:
水平运动传动形式:同步带/齿轮齿条
垂直运动传动形式:同步带/齿轮齿条/丝杆
5.负载重量:最大负载1000kg
6.运动控制系统:PLC/运动控制卡/CNC
7.手爪驱动:气动/电动,根据工件不同定制,自动换爪功能
8.料仓/输送线:根据工件不同定制
以上两种形式的机器人都可以很好的完成加工工件的上下料工作。都有其自身的特点。关节式机床上下料机器人工作效率高,动作节拍快,占地空间小,但是成本投入相对高一些。坐标式机床上下料机器人工作效率高,占地空间相对大一些。但是成本的投入要少很多。这两种形式的选择还要看现场的工艺及要求来决定。
现代加工工艺要求高效质量,机床上下料机器人有着符合这个时代意义的特性,它将引领这个时代加工工艺质的飞跃。
南通机床公司一台VM600加工中心出于提高工效和降低员工劳动强度的需要,加装了一台能自动完成上、下料工作的机器人。当机器人完成上料后,防护门关闭,工件自动装夹,加工完成后,工装放松,防护门打开,再由机器人卸料。
1.硬件要求
此次改造中,我们新增了能实现自动装夹的气动工装,自动打开和关闭的气动防护门等,并通过PLC输入输出接口,与机器人完成工作状态的应答。为了实现动作的精确及安全,对硬件的配置有如下要求:
(1)气动工装,设有夹具夹紧及放松到位检测开关。
(2)气动防护门,设有开门及关门到位检测开关。
(3)控制工装及防护门动作的电磁阀为两位双电控电磁阀。
2.工作逻辑框图
机床和机器人共同完成抓料、加工和缷料的控制过程流程如图1所示。
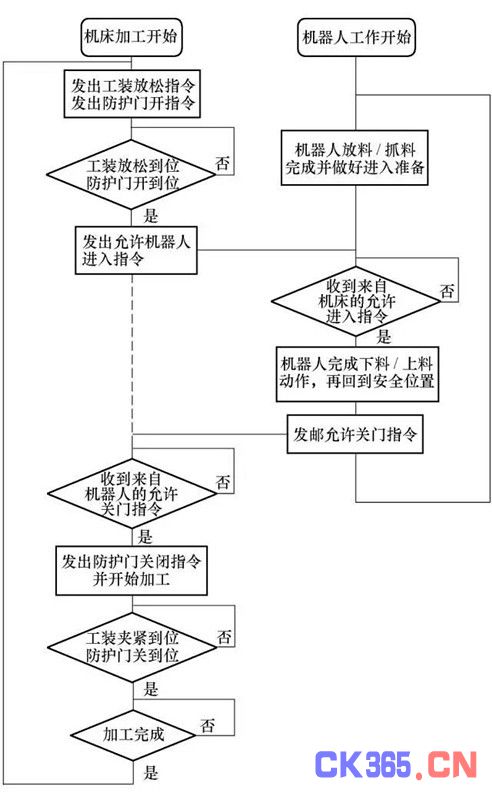
图1
(1)从图1可以看出机床防护门的打开是在全部加工结束以后,防护门的关闭也要机床与机器人交互应答之后才能发出关闭指令,通过实际测试,这两项时间总计有4s左右,假如能巧妙地利用好切削前的准备时间和切削后的各轴复位移动的时间,就能最大限度地压缩这4s左右的非切削时间,从而实现我们的工效目标。
通过攻关,我们发现最好的解决办法就是在加工过程快结束时,由机器人直接控制开门,又当机器人完成上料工作后,再由机器人直接控制关门。经此改动后,整体加工时间压缩了约3.5s。
(2)考虑到机器人有时会存在如保养或故障时无法工作的情况,而我们又希望机床能够不停机、持续地加工产品,为此我们在机床侧加装了一个“机器人模式”与“人工模式”切换旋钮,当处在“人工模式”时,就同时将机器人置为紧停状态,这时防护门的开、闭由机床控制。这样一来,会出现防护门的开、闭既可以由机床控制,也可由机器人控制的情形(实际上,在正常情况下,如前面所说当处于“人工模式”时,机器人被置为紧停状态,机器人是不会发出开、闭门指令的),仅出于安全上考虑,控制机床防护门动作的电磁阀,其电气动作应设计成:当电磁阀得电时执行动作,当动作完成后,就失电,即不能让电磁阀处于长期通电的状态。
在进行电控设计时,有必要说明一点,由于防护门的开合既要由机床来控制,又要由机器人来控制,且控制命令要以收到门开、门关到位信号来结束,而装在门上的门开、门关到位检测开关各只有一个,如何供机床和机器人两个控制单元使用呢?并且还要保证机床和机器人各自24VDC直流电源供电电路的独立性。我们设计了如图2~图4所示的控制电路。
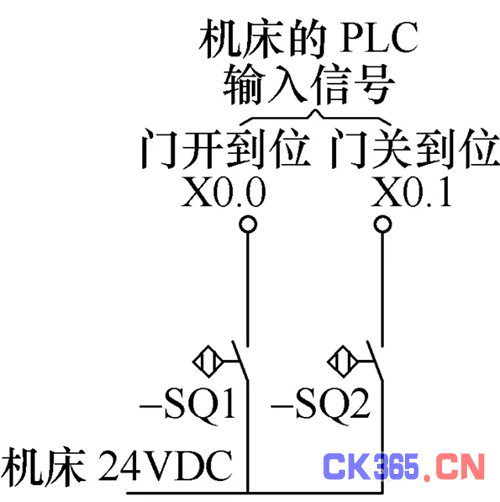
图2
注:SQ1、SQ2为防护门开、关到位检测开关;X0.0、X0.1为机床PLC输入信号地址。
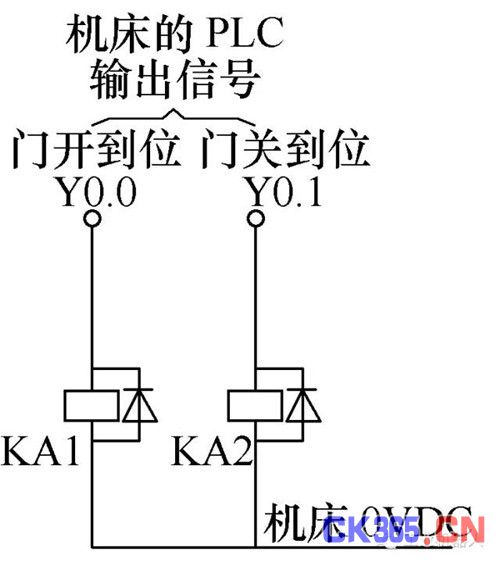
图3
注:KA1、KA2为中间继电器;Y0.0、Y0.1为机床PLC输出信号地址。
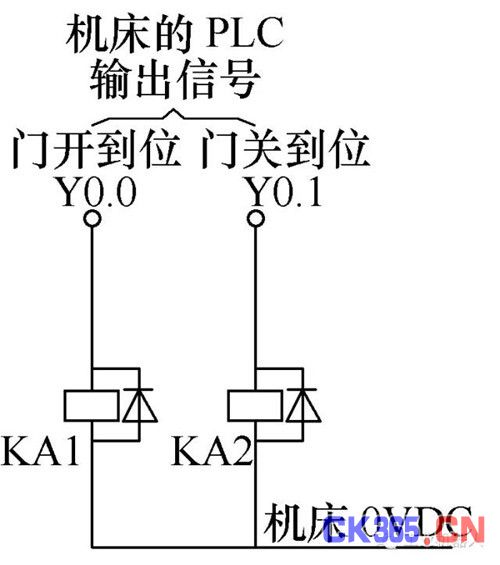
图4
机床上的PLC逻辑如图5所示。

图5
注:同上X0.0、X0.1为机床PLC输入信号地址;Y0.0、Y0.1为机床PLC输出信号地址。
(3)在使用时还发现当机床在执行工装夹紧工件工作有时会出现误信号,而机床和机器人全然不知,继续执行加工,从而造成对工装或刀具的损坏。我们通过仔细观察,最终找到了原因——由于其他状况的出现,机器人实际上没有把待加工的工件放置在工装上,机床执行工装夹紧命令时,工装上的夹紧缸在推动夹爪移动的过程中,会发出一个瞬间的工装夹紧到位信号,让机床和机器人误认为工装夹紧动作已经完成。
后来将机床的PLC控制程序改成了机床在执行工装夹紧命令时,只有工装夹紧信号能持续地发出一段时间(如1s),才认为工装夹紧动作正常完成。






