明尼苏达大学Michael C. McAlpine教授在Adv. Mater.上发表了其课题组的最新研究成果“3D Printed Stretchable Tactile Sensors”,本站之前也对其进行了报道。据悉,研究人员采用多材料、多尺度和多功能的3D打印方法,在自由表面上加工生成了3D触觉传感器。个性化触觉传感器具有检测和区分人体运动状况的能力,包括脉搏监测和手指运动等。利用个性化3D打印技术生产功能材料和设备,可以实现可穿戴电子系统中的各种传感器的生物兼容性的优化调整,为仿生皮肤的应用开辟新路线。接下来小编就为大家详解其中的原理以及应用。
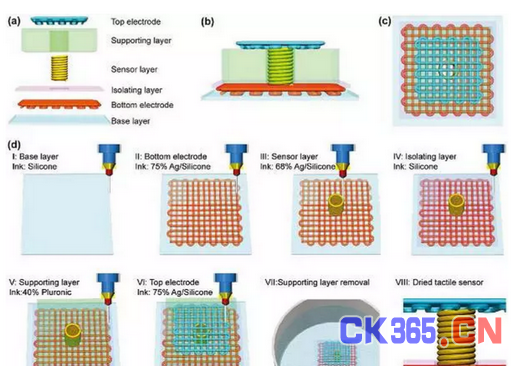
图一 触觉传感器设计原理和3D打印过程示意图
(a)触觉传感器的组成示意图:基底层、顶部和底部电极、隔离层、传感器层和支撑层;
(b)触觉传感器的侧视图;
(c)触觉传感器的俯视图;
(d)玻璃基板上触觉传感器的3D打印过程,包括8个步骤:
步骤I:打印面积为16mm2的方形硅氧烷基底层;
步骤II:使用75wt%银/硅氧烷油墨在基底层上打印9mm2的方形底部电极层;
步骤III:使用68 wt%银/硅氧烷油墨在电极层上打印半径为350μm,高为1mm,壁厚为150μm的圆筒壁作为传感器层;
步骤IV:使用硅氧烷油墨打印9mm2的隔离层;
步骤V:使用40 wt%普朗尼克墨水打印厚度为0.8mm的9mm2的方形支撑层;
步骤VI:使用75 wt%银/硅氧烷油墨打印4mm2的方形顶部电极层;
步骤VII:将传感器浸泡3小时以除去支撑层;
步骤VIII:干燥传感器。
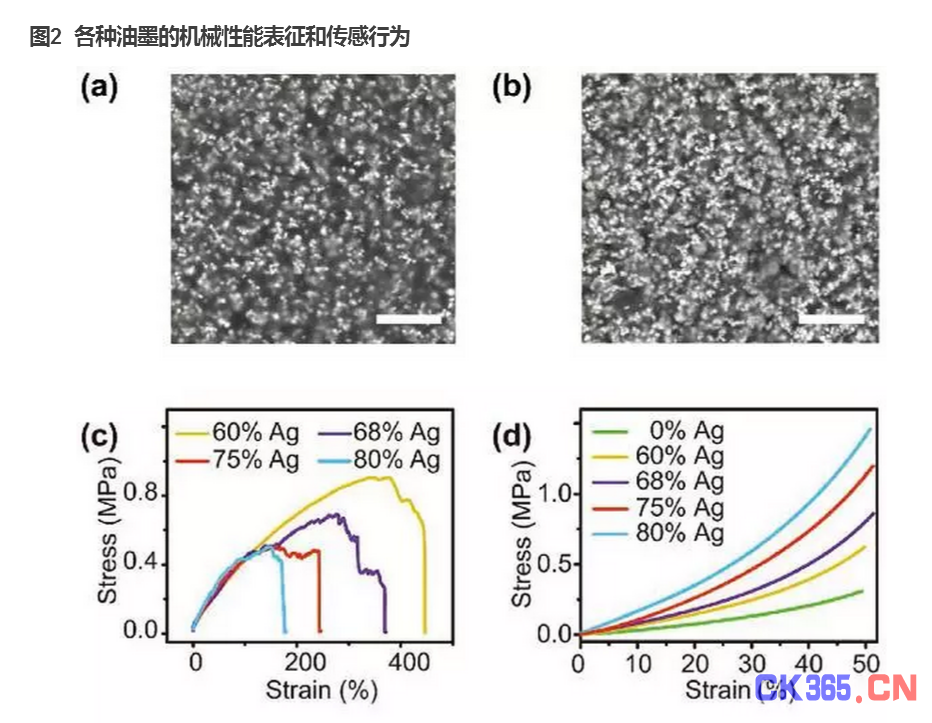

(a-b) SEM图表明Ag颗粒在68 wt%和75 wt%银/硅氧烷油墨中的分布,标尺为5μm;
(c) 具有不同Ag含量的固化油墨的拉伸曲线;
(d) 具有不同Ag含量的固化油墨的压缩曲线;
(e) 三种油墨的外加压力与其电阻的关系曲线,其中68 wt%Ag的样品为圆柱体(直径1mm,高度为1mm),70 wt%和80 wt%Ag的样品为细丝状(长度为15mm,直径为0.2mm);
(f) 三种不同的循环压力作用下,68 wt%银/硅氧烷油墨传感层的相对电流变化情况。
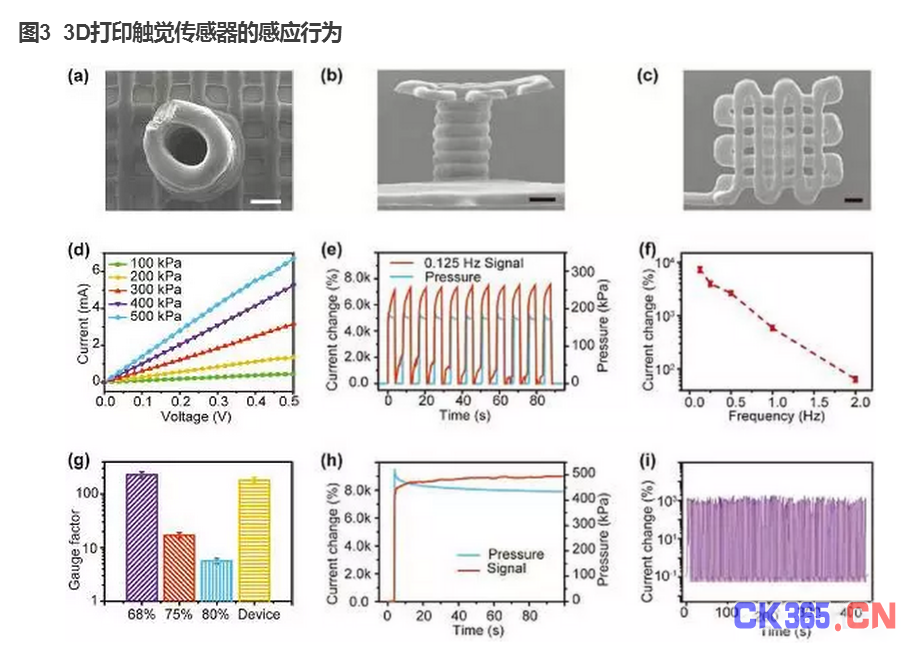
(a)SEM图,3D打印触觉传感器传感器层的俯视图;
(b-c)3D打印触觉传感器的侧视图和俯视图,标尺为200μm;
(d) 不同压力下触觉传感器的电流-电压特征曲线;
(e) 在0.125 Hz的输入频率下,200 kPa的动态压力对应的响应频率;
(f) 在200 kPa压力作用下,不同输入频率与电流变化曲线;
(g) 不同油墨材料和触觉传感器装置的平均压缩系数;
(h) 在初始压力为500 kPa时,施加恒定应变时触觉传感器的电流变化;
(i) 频率为0.25Hz,压力为100kPa时,进行100次循环,触觉传感器装置的电流变化。
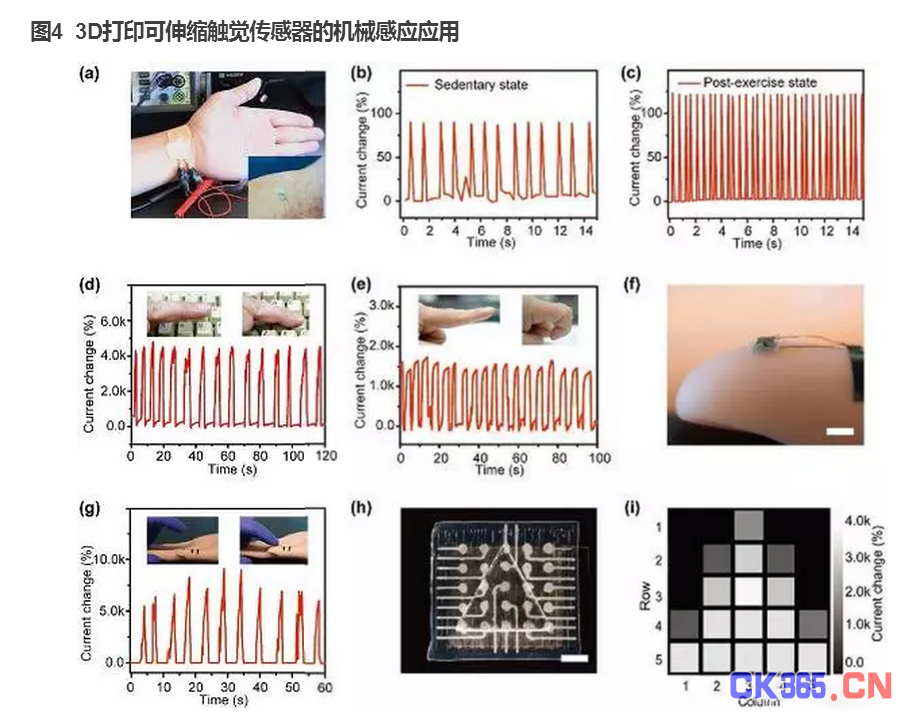
(a)位于桡动脉上方的触觉传感器照片,测量径向脉冲信号;
(b)久坐情况下测量的脉冲信号;
(c)上下楼跑5分钟后测量的脉冲信号;
(d-e)按压和弯曲的情况下,动态加载和循环次数对电流信号变化的影响;
(f)3D打印触觉传感器位于人的指尖,标尺为4mm;
(g)当用手指按压触觉传感器时,其电流信号变化情况;
(h)位于触觉传感器(面积为1cm2)表面上的三角形玻璃物体的俯视图,标尺为 2mm;
(i)在三角形玻璃(0.096g)上放置质量为50g的物体时,压力分布的信号映射。

采用不同含银量的银/硅氧烷油墨3D打印出微型触觉传感器,通过实验证实该传感器对应变、压力等的变化能够进行准确检测,此外通过在人体上的实验,进一步证实该传感器对机械信号十分敏感,可以准确检测人体的运动状况。这一研究成果的发表为个性化3D打印传感器开辟了新的路线。