我现所在公司于2015年接到了制造俄罗斯海尔冰箱生产线的定单,为了减少人工成本和实现生产线高度自动化,在生产线冰箱包装部分使用机器人进行套箱(把纸箱套到冰箱上)如下图:
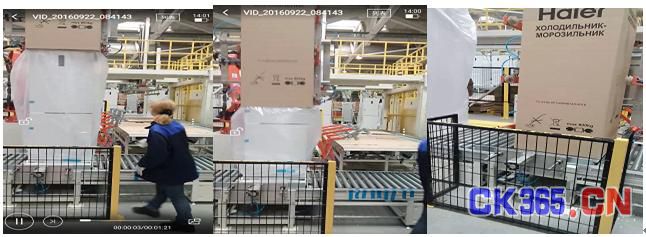
动作流程:
冰箱的型号识别--送纸箱机械手根据型号从纸箱储存库挑选相应的纸箱并送到纸箱立起机构--纸箱立起机构把纸箱立起—机器人从纸箱立起机构上接过纸箱并运行至冰箱的正上方—冰箱到达后机器人把纸箱套到冰箱上—完成后机器人返回到原点位等待。
系统构成:
三菱PLC-FX3U-128MT,通信模块FX3U-485BD,德国SICK扫描器CLV650-1000及韩国现代机器人hs180-02等等。PLC与机器人间信息交换通过IO点的方式进行,PLC与扫描器间通信通过RS-485自由模式进行(9600,1,8)。
PLC对机器人的控制方法:PLC根据机器人反馈回的当前所在位置信号而决定要执行那一步动作,然后输出相应的选通机器人运行程序信号来实现。
机器人发给PLC的输入点定义:DO1/X161-机器人已到取纸箱位、DO2/X162-机器人取后升起到位、DO3/X163-机器人已摆好姿态、DO4/X164-机器人取纸箱后已转到冰箱上方位、DO5/X165-机器人已把纸箱套进冰箱头部、DO6/X166-机器人已把纸箱套到冰箱底部、DO7/X167-机器人套箱后已上升到冰箱上方、DO8/X170-机器人已回到到取箱位上方等待、DO26/X172-机器人执行程序结束、DO27/X173--机器人异常、DO29/X174--机器人运行、DO30/X175--机器人自动、DO31/X176--机器人准备好、DO32/X177--机器人在原点。
PLC发给机器人的输出点定义:Y101/DI1—启动机器人、Y102/DI2—停止机器人、Y103/DI3—选机器人运行程序1信号输出、Y104/DI4—选机器人运行程序2信号输出、Y105/DI5—选机器人运行程序3信号输出、Y106/DI6—选机器人运行程序4信号输出。注:在机器人示教器上我写了9个程序,机器人程序的选用通过以上4个输出信号组合成二进制码来实现,例如:要选机器人6号程序,那么对应的二进码是0110。
机器人程序的介绍:
为了方便现场工作人员的实际操作,每一个动作我只写一条程序,同时定义此动作执行完成时是输出那个信号以便PLC知道机器人的当前所在位置,例如:程序1机器人的动作是以圆弧60%速度执行精度3的方式回到原点位,回到原点位后机器人输出信号DO32=1,机器人示教器里面的内容是S1MOVE P,S=60%,A=3,T=1;END。然后告诉现场操作人员每一个程序是执行那一个动作,教会他们怎样通过示教器执行想要的动作,例如:假设机器人现处于程序2位置要回到程序1位置,那么操作方法是第一步是把示教器钥匙从远程操作位置打到中间的运行位置,第二步是在示教器上选1号程序,第三步是按动示教器的运行按键即可完成。这样的好处是:当机器人在运行过程中出现诸如纸箱脱落这样的简单故障时,现场经过简单培训的操作人员即可处理,提高生产效率。






