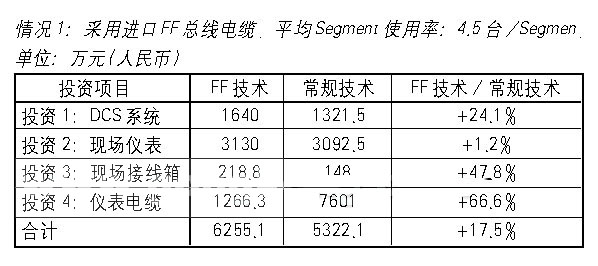
利用 AD8302 的相位差测量功能, 可用来测量两天线接收同一信源信号时所得的两信号的相位差,以判断信源 相对于两天线中轴线的位置。如图1天线 A 与天线 B 相距 d,信源(即目标)与两天线中轴线 oy 的夹角为θ,两天线 收到的信号的相位差为ΔΦ,信源工作波长为λ,则有: Δφ=2πdsinθ/λ, θ =arcsin(ΔΦλ /2πd) ,测量出ΔΦ,即可计算得θ角,利用它可用来对目标进行角度测量和跟踪。

图1 示意1
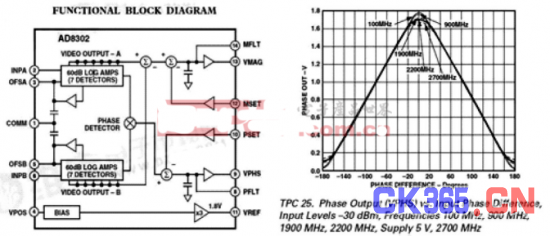
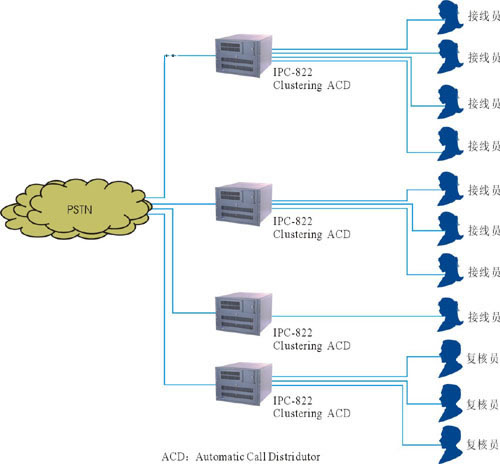
图2
比相测角系统需采取的技术 AD8302 的内部框图,鉴相 曲线如图2。工作频率 f<2.7Ghz,相位测量范围+/-180 度,鉴相输出 电压 30mv—1.8v, 鉴相斜率 10mv/度,相位中心点输出电压 为 900mv。
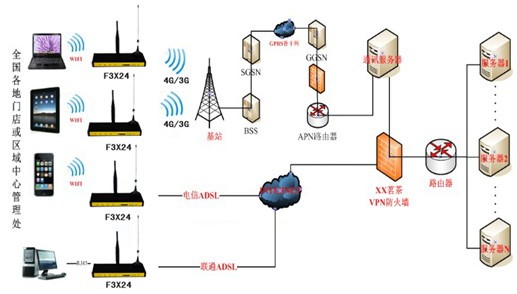
1.利用鉴相输出电压无法判定ΔΦ的符号,需增加固定 移相器加开关电路 ,如图 3,判定ΔΦ的符号,以满足比相 测角公式的要求:
θ=arcsin(ΔΦλ/2πd), ΔΦ为 –180 度——0 度时,θ为负值,目标在左边。ΔΦ为 0 度——180 度时,θ为正值,目标在右边。
如图3,在天线 A 支路中串接一固定移相器,移相量 ψ可以是 90/60/30 度等。首先,不接入固定移相器,开关 打到位置 1,此时,Δφ=φa-φb, 测得此时的 Vphs1, A/ D, 存储。第 2 步,将开关打到位置 2,A 支路串入固定移 相器ψ,此时ΔΦ=Φa+Ψ-Φb, 测得Vphs2, A/D, 存储,比 较判决: 若 Vphs10,θ>0;Vphs2,A/D, 存储,比较判决:若 Vphs10, θ>0。
也可以采用另一种方案,用两 片 AD8302,两个功分器 PS 和一个固 定移相器Ψ 来完成ф 符号的判定, 如图 4 所示。
2 . 通 常 , 目 标 信 源 由 中 频 信 号经上变频, 功放等产生, 电路噪 声, 相位噪声, 使信号相位含随机变 化 部 分 。同样,接收信号时,需进行低噪声放大,下变 频,中放 ,信号相位也会产生随机变化。这些随机起伏将导致相位差测量的随机误差,随之使计

图3
算得的θ产生误差。Δθ,降低测角精度。为此必需对相位差数据进行平均值或均方根值计算。i=n平均值 E(Δφ)=Σδφi/n , n=1----10。
i=1 i=n均方根值 RMS(Δφ)=√Lßφi2/n , n=1----10. i=1AD8302 已用于某微波波段系统中,采用了 Helicone 天
线,接收系统将 RF 信号经 LNA下变频至 10.7Mhz 中频。两路中频信号 经Φ符号判决电路送入 AD8302 鉴相,芯片输出

图4
的模拟电压经 A/D 转换器转化为 10 位数据,采样 8 次取平均值,判定Φ的符号,运算后得到方位值。此信号可用来显 示和驱动天线跟踪。系统覆盖距离×××Km。在前端 S/N=10dB 时,方位误差δ三0.25 度,其中含天 传分系统误差。小角度θ的
计算公式为:θ=K△Φ。