理解感知层与感知节点的特点,需要注意以下几个问题。
1.不同的物联网应用系统感知节点的差异很大
感知节点可以是小到用肉眼几乎看不见的物体,也可以是一个大的建筑物;它可以是一块很小的芯片,也可以是像台式计算机大小的智能测控设备;它可以是固定的,也可以是移动的;它可以是有生命的,也可以是无生命的;它可以是人,也可以是动物。有的节点可以感知物理世界的温度、湿度、声音、压力等物理参数,有的节点可以感知氧气、二氧化碳等化学成分的含量等化学参数,有的节点可以感知位置信息,有的节点可以作为物体身份识别的标记。所有物联网中的感知节点都有一个共同的特点,即它们被安装了感知芯片或设备,具有自动感知外部环境变化和通信能力。但是,不同的物联网应用系统感知节点的差异很大。图2-1给出了不同类型的物联网感知节点。

2.感知节点的感知能力与控制能力
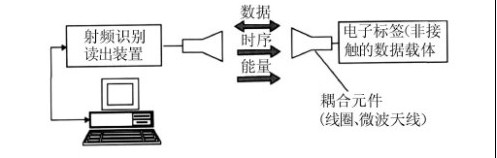
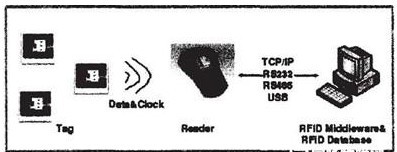
人们将RFID形容成能够让物体“开口”的技术。RFID标签中存储了物体的信息,通过无线信道将它们存储的数据传送到RFID应用系统中。一般的传感器只具有感知周围环境参数的能力。例如,在环境监测系统中,一个温度传感器可以实时地传输它所测量到的环境温度,但是它对环境温度不具备控制能力。而一个精准农业物联网应用系统中的植物定点浇灌传感器节点的设计者希望它能够在监测到土地湿度低于某一个设定的数值时,就自动打开开关,给果树或蔬菜浇水,这种感知节点同时具有控制能力。在物联网突发事件应急处理的应用系统中,核泄漏现场处理的机器人可以根据指令进入指定的位置,通过传感器将周边的核泄漏相关参数测量出来,传送给指挥中心。机器人根据指挥中心的指令打开某个开关或关闭某个开关。从这个例子可以看出,作为具有智能处理能力的传感器节点,它必须同时具备感知和控制能力,同时具备适应周边环境的运动能力。因此,从一块简单的RFID标签芯片、一个温度传感器或测控装置,到一个复杂的智能机器人,它们之间最重要的区别表现在:感知节点是不是需要同时具备感知能力和控制、执行能力,以及需要什么样的控制、执行能力。
3.对感知层技术发展的讨论
在讨论感知层技术时,我们需要注意两个问题:
一是由于一些实际的物联网应用系统要求末端的感知节点同时具有感知与控制能力,因此一些技术资料也将感知层叫做“感知控制层”。本书采用通用的表示方法,简称为“感知层”。
二是我们目前讨论的物联网主要涉及大规模与低造价的RFID、传感器的应用问题,这在物联网发展的第一阶段是非常自然和必须的。但是作为信息技术研究人员,我们不能不注意到世界各国正在大力研究的智能机器人技术的发展,以及智能机器人在军事、防灾救灾、安全保卫、航空航天及其他特殊领域的应用问题。智能机器人具有很强的对外部环境的感知能力,自适应与协同各种能力,以及对问题的智能处理能力。目前,通过网络控制大量智能机器人协同工作的机器人集群的研究,正在一步一步展示出它能够更有效地扩大人类感知世界、智慧处理问题能力的应用前景。当智能机器人技术日益成熟并应用时,它必然会进入物联网,成为物联网重要的成员。因此在讨论感知层的特点时,我们必须前瞻性地预见到这个问题。