在本文中,将为大家介绍逆变电源中较为重要的控制系统部分,采用图文结合的方式来帮助读者们理解逆变电源的原理与设计思路,快来一起看看吧。
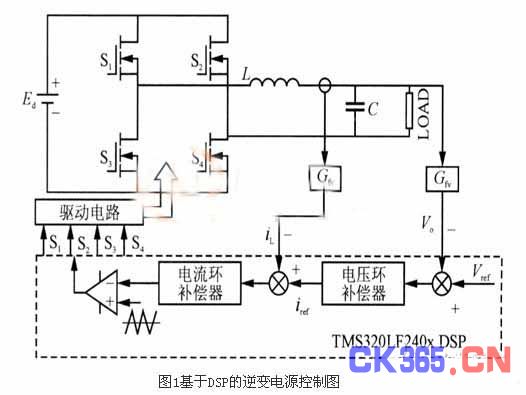
图1为基于DSP的逆变器系统控制方案的示意图,如果系统引入电感电流内环,不仅可以增加系统的稳定性,还能适当降低谐振峰值。因此,在重复控制电压外环的内部加入电流内环,构成重复控制双环,可以增加重复控制系统的稳定性,还能降低补偿器设计难度。
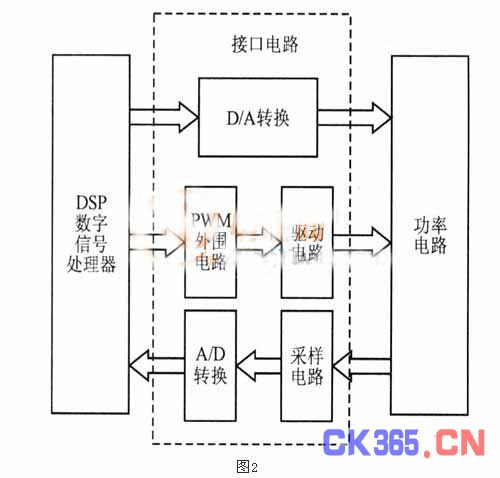
图2是数字控制系统的结构框图。系统模拟部分主要是功率电路和接口电路,数字部分。接口电路是设计时需要特别考虑的,它需要实现数据的转换(A/D,D /A),针对不同的A/D,还需要特别设置电平转换电路。而门极驱动电路不仅要提供足够的能量以驱动功率模块,还需要隔离,以保护数字芯片。最后通过数字部分的编程,实现数字控制。
根据内模原理,重复控制设计的基础是受控系统稳定,然后加入重复内模,以获得周期性输入或干扰的无静差特性。设计重复控制系统需要知道受控系统的精确模型,这样才能设计出满足稳定域关系的补偿器。加入重复控制器后的系统如图3所示。
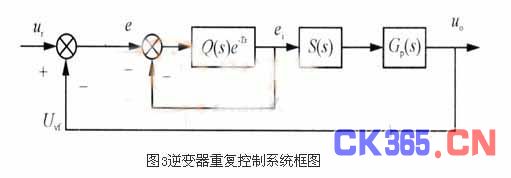
图1中T是基波周期;S(s)为需要设计的补偿器;Gp(s)为受控系统的平均模型,即式(3)。
为简化分析,忽略滤波电感等效串联电阻rL和滤波电容等效串联电阻rc,将Kvf,Utr、Ud恒定增益环节视为单位增益,可以得到简化为单位反馈的逆变器平均模型,即:

由图1可以获得重复控制系统的开环传递函数为:
由于纯延时环节e-Ts的存在,模拟上难于实现,需要将其离散化,从而采用离散系统的分析方式。其中e-Ts=z-N,N为一个基波内的采样次数。Q是用于改善重复控制器内模临界稳定特性的,可以是一个略小于l的参数或低通滤波器,常数型Q和函数型的对比,函数型在低频段具有更高的增益,稳态特性将更加理想,不过也能看出它会引入相移,因此,需要再针对它设计相位补偿,设计不好,系统有可能不稳定,反而达不到预期的稳定性补偿效果,因此,在通常的设计中,常选择常数性Q=0.95作简化设计。
本文对基于DSP的逆变电源控制电路部分进行了讲解,通过图文并茂的方式来帮助初学者加强对逆变电源的认识。对逆变电源感兴趣的朋友不妨花上几分钟来阅读本文,相信会有意想不到的收获。