我们可能都见到过需要随时间变化扫描频率的情况。如果您遇到这样的问题,可以考虑雷达等应用,在这类应用中发送的信号不仅可由目标反射回来,而且还能够与接收到的信号进行比较,如下图 1 所示。观察频率 (Df) 差异,我们可确定信号返回所需的时间 (Dt)。知道该时间后,我们就可以算出与目标的距离。如果让线路的斜率更陡,那么系统对噪声的敏感度就会降低,但这样做的代价是缩小了覆盖范围。
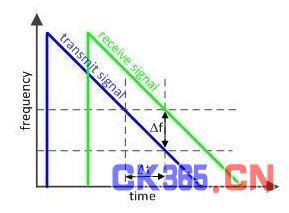
图 1:频率线性调频波形
对于雷达应用而言,重点是要让图 1 中产生的波形具有极高的线性度与恒定斜率,以避免频率计算错误。在允许较高非线性度的应用中,可使用数模转换器 (DAC) 来调节电压控制振荡器 (VCO) 的控制电压,以生成所需的波形。该开环方案的一个难点是波形的斜率会受到部件间变化、温度、VCO 频率漂移以及 VCO 频率提供推频的影响。
对于需要更好线性度的应用,可选用锁相环 (PLL)(例如 LMX2492)方案通过在反馈分频器中添加部分调制功能来创建波形。下图 2 是实际测量结果,其着重解决从 9850 至 9400MHz 的 45us 频率线性调频挑战。频率突变会导致过冲与周跳,但通过将器件编程至 9800MHz 并保持 5us,然后继续斜坡变化,可减少该问题。通过使用图 2 所示的这种双斜坡方案,可提高性能。

图 2:所测量的 LMX2492 频率线性调频
除了使用额外频率斜坡改善波形线性度以外,它们还可用来创建更复杂的波形。例如下图 3 所示,双斜坡方法可用来计算移动目标的多普勒转换。
图 3:双斜坡方案
这些实例都非常基本,但您可使用更多的线性段创建更复杂的波形,或者引入更多斜坡。