配置串口通信数据位、校验位、停止位
通常我们使用Serial.begin(speed)来完成串口的初始化,这种方式,只能配置串口的波特率。而使用Serial.begin(speed, config)可以配置数据位、校验位、停止位等。例如Serial.begin(9600,SERIAL_8E2)是将串口波特率设为9600,数据位8,偶校验,停止位2。config可用配置如下:

if (Serial)的用法
当串口被打开时,Serial的值为真。串口被关闭时Serial的值为假。比较囧的是,这个方法只适用于Leonardo和micro的 Serial,也就是说连接连接到电脑USB的那个模拟串口。例如以下程序,当你没有使用串口监视器打开串口时,程序就会一直循环运行while (!Serial) {;} ,当你打开串口监视器,程序会退出while循环,开始loop中的程序。

read和peek输入方式的差异
串口接收到的数据都会暂时存放在接收缓冲区中,使用read()与peek()都是从接收缓冲区中读取数据。不同的是,使用read()读取数据后,会将该数据从接收缓冲区移除;而使用peek()读取时,不会移除接收缓冲区中的数据。你可以使用以下程序,观察其运行结果:

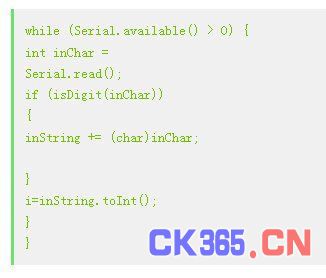
串口读入int型数据
实际上是串口读入字符串,再转换为int型数据。
输出不同进制的文本
我们可以是用 Serial.print(val, format)的形式输出不同进制的文本
参数val 是需要输出的数据
参数format 是需要输出的进制形式,你可以使用如下参数:
BIN(二进制)
DEC(十进制)
OCT(八进制)
HEX(十六进制)
例如,使用Serial.print(123,BIN),你可以在串口调试器上看到1111011
使用Serial.print(123,HEX),你可以在串口调试器上看到7B
修改串口缓冲区大小
Arduino串口缓冲区默认为64字节,如果你单次传输的数据较多可以将arduino-1.0.5-r2hardwarearduinocoresarduinoHardwareSerial.cpp中的
#define SERIAL_BUFFER_SIZE 64
修改为 #define SERIAL_BUFFER_SIZE 128
这样就有128字节的缓冲区了
Arduino MEGAArduino DUE上其他串口用法
serial1serial2serial3和serial用法一样,比如serial3.begin(9600);