0 引言
PSD作为一种精密的光电位置传感器,具有灵敏度高、响应时间短、位置分辨率高、光谱响应范围大等特点,因此被广泛应用于现代光电检测技术中,尤其是高精度、高速度的数据采集技术中。如何在极短的响应时间内实现多数据的采集,成了采集PSD输出数据的关键。本文基于单片机技术,设计搭建了一套高速的PSD输出数据采集及控制电路,通过在实验室条件下对PSD输出数据进行采集,从而为后续的PSD定位精度以及抗干扰研究奠定理论基础。
1 PSD 的工作原理
光电位置敏感器件PSD(Position Sensitive Detector)是一种基于横向光电效应、连续分布的半导体位置探测器件,能快速、准确给出入射光点在光敏面上的位置,即PSD输出的信号与光点在光敏面上的位置有关。如图1所示,表面P+层为感光面,两边各有一信号输出电极。中间为I层,底层的公共电极用于加反向偏压。当光线入射到光敏面上时,由于与结面平行的横向电场作用,光生载流子形成向两端电极流动的电流X1 和X2,且总电流X0 = X1 + X2.
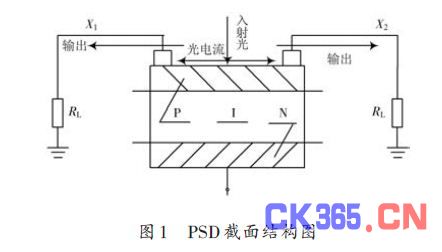
当入射光斑与两电极的间距发生变化时,两电极的输出电流也随之变化,从而实现了位置测量功能。
如图2 所示,如果PSD 的面电阻是均匀的,且阻值R1 和R2 远大于负载电阻RL,则R1 和R2 的值仅取决于光点的位置,即:
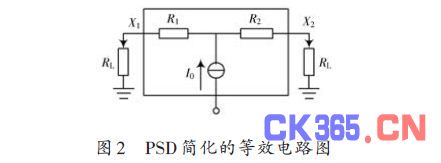
式中:L 为PSD 中点到信号电极的距离;x 为入射光点到PSD中点的距离。
将X0 = X1 + X2 代入式(1),即可得到光点坐标:

显然上式与入射光强X0 无关,这就是一维PSD 的定位原理。二维PSD的基本原理与一维PSD相同,只是计算公式不同。
2 PSD 的选取
本文选取的是瑞典SiTek公司出品的SPC01光电位置传感器。它是一款二维两面分流型PSD,采用PSD使用厚膜技术制造,将PSD 传感器与处理电路集合为一体,处理电路只有前置放大、加法器和减法器,其处理电路框图如图3所示。
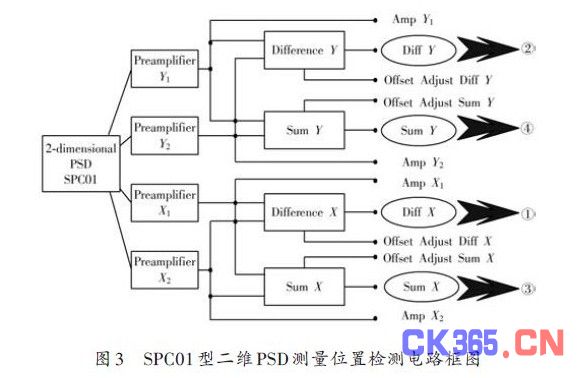
将输出电压Diff X、Diff Y 和Sum X、Sum Y 与二维位置的关系式为:


因此,采集对象为Diff X、DiffY、Sum X、Sum Y 四个输出量,通过对四输出量的采集,便可运用原理运算来实现PSD在二维坐标下的位置数据。
3 数据采集及控制电路
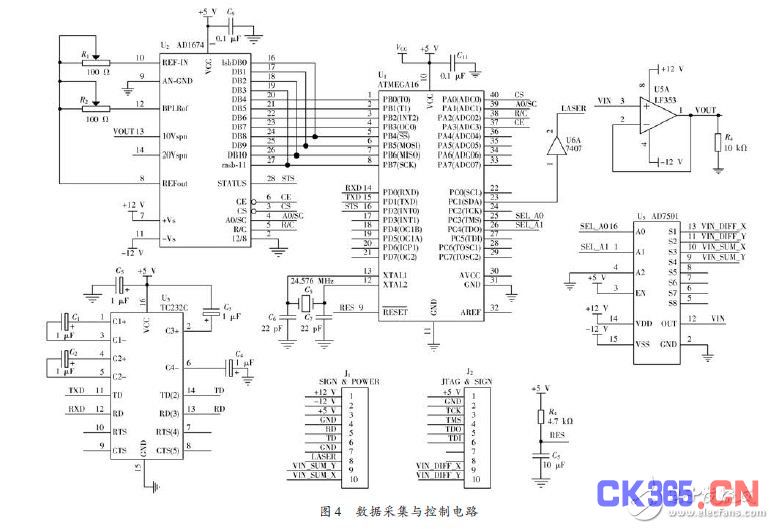
基于单片机的PSD 数据采集及控制电路由Atmega16单片机、AD1674模/数转换芯片、AD7501多路转换开关、MAX232 串行通信芯片等组成,其电路框图如图4所示。
3.1 多路转换开关
AD7501 是一个8 通道多路转换开关,其功能是通过三个二进制的地址线来选择一个有效的输入[5]。其具体连接关系如图5所示。
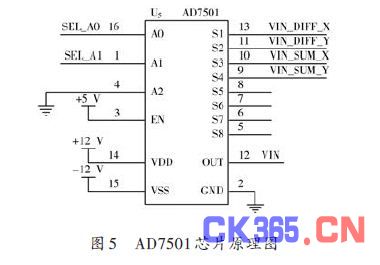
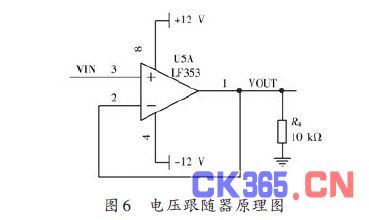
图5中,使能端EN(3)与+5 V相连,使其始终处于工作状态;信号输入端S1~S4(13、11、10、9)分别与PSD输出信号Diff X、Diff Y、Sum X、Sum Y 相连;输入信号选择端A0、A1(16、1)分别由Mgea16 单片机的I/O 口PC3(25)、PC4(26)控制、A2(4)与GND相连,依序选通4路输入电压信号,送至图6所示的电压跟随器后进入AD1674进行模/数转换;
3.2 模/数转换电路
AD1674是美国AD公司推出的一款12位带并行微机接口的逐次逼近型模/数转换芯片。基本特点和主要参数如下:
带有内部采样保持的完全12位逐次逼近(SAR)型模/数转换器;采样频率为100 kHz;转换时间为10 μs;数据可并行输出,采用8/12 位可选微处理器总线接口;采用双电源供电:模拟部分为±12 V或±15 V,数字部分为+5 V.

如图7 所示,AD1674 的数据输出端口DB4~DB11(20~27)与单片机的PB口(1~8)相连;AD1674工作状态由逻辑端口(2~6)控制,其真值见表1.
由单片机控制CE 为高电平,CS、R/C、A0 为低电平,启动12 位数据转换;转换状态输出端口STS(28)与单片机的PD2(16)相连,当STS为高电平时,AD1674处于模/数转换状态,而STS为低电平时,模/数转换结束,可以读取转换数据;由于只采用8个输入端口读数据,故转换的12位数据需要分两次读出:即先将R/C、A0端口(5、4)电平置高,读低4位数据至单片机,然后将A0端口电平置低,读高8位数据至单片机。
3.3 单片机控制电路
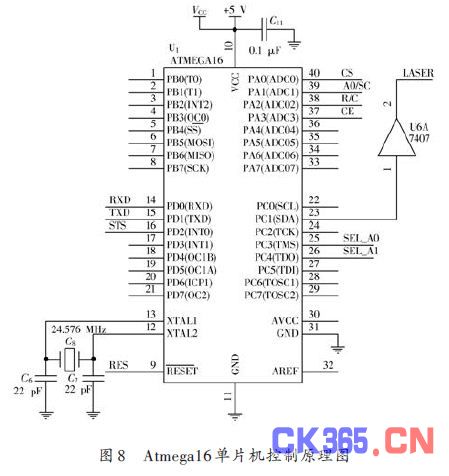
单片机是整个电路系统的核心部件,其作用是控制实验过程和数据的转换、存储与传输。本实验采用ATMEL 公司的Atmega16单片机,其引脚及功能如图8所示。
3.3.1 信号控制
单片机的PC1 口(23)接7407 同相缓冲器,信号经电流驱动后调制激光器发光。
3.3.2 数据存储和串行传输
(1)数据存储
如图4 所示,单片机的PB 口(1~8)与AD1674 的数据输出端(20~27)相连,为A/D 转换后的数字电压输入口,每次传输8位数据。由3.2节可知,电压信号经A/D转换后为12位数字信号,需分为2次传输,而单片机也需要2个字节存储1个数据。即采集PSD输出的Diff X、DiffY、Sum X、Sum Y 等4个数据需要8个字节存储。
(2)数据传输
由于采集的数据在单片机中是连续存储的,因此数据通过RS 232 串行传输至计算机时,需对采集的数据进行分组、加标识,以免数据组合时发生错误。
表2给出了对Diff X、DiffY、Sum X、Sum Y 4个12位二进制数据编码的规则。

即采集的一组数据,每个字节中前2位为标识位,后6位为数据位,并且只对前4个字节的标识位进行编码。
Mega16单片机的串行通信端口RXD(14)和TXD(15)分别与MAX232串行通信芯片[8]的RXD(11)和TXD(12)端连接,通过串口实现与计算机的通信,并可在计算机中使用串口调试工具Comtools软件读取数据。最后经数学处理,得到表示x,y 位置信息的数字电压值。
3.4 实际电路
图9为数据采集、信号传输及过程控制单片机电路的实物图。

4 结论
本文先通过介绍高精度光电位置传感器PSD的工作原理,并根据实际选取的SiTek公司出品的SPC01型PSD的结构及输出特性,然后提出了一种基于单片机技术的PSD输出信号数据采集电路的设计方案。该设计方案中的电路在保证有效对数据进行快速采集的基础上,具备结构简单、成本低廉、体积较小等优点,适合在实验室条件下进行实验操作,为后续的PSD定位精度、输出特性、抗干扰措施等研究奠定基础。



