YD5000简介
YD5000是一款通用高性能矢量变频器,是真正的电流矢量控制变频器,以先进技术的控制理论为基础,通过智能化的控制手段,使变频器控制的调速系统达到了极高的响应性、稳定性,使YD5000真正能在各种工业现场应用自如。
1,YD5000的命名方式
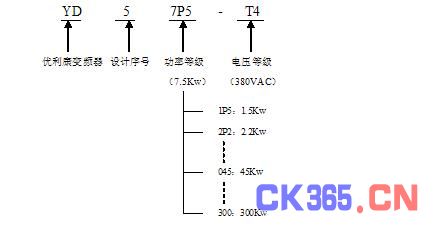
2,YD5000的功率范围
1.5Kw~300Kw共21个机种,电压等级均为380VAC
3,YD5000的基本配置
• 数字式操作器:二种语言显示(中文、英文)
可进行如下操作:显示或修改所有的参数;本机起动、停止、点动、正反转; 本机操作和远程操作的切换。
• 18.5Kw~160Kw的机种已内置DC电抗器,可抑制高次谐波;
1.5Kw~15Kw的机种可外接DC电抗器;
18.5Kw~300Kw的机种可外接AC电抗器。
• 3.7Kw~15Kw的机种已内置制动单元;18.5Kw及以上的机种需电阻制动时,要外接制动单元。
4,YD5000的使用环境
• 防护等级:IP20
• 环境温度:-10℃~45℃,超过范围应降额使用
• 相对湿度:<90%
• 防止雨水或潮湿环境;防止粉尘、棉絮、金属粉屑;防止各种腐蚀性液体和气体
• 在海拔1000米以上应降额使用
5,YD5000的基本参数
• 电源电压:380VAC~440VAC +10%/-15% 50Hz/60Hz +5%
• 输出电压:对应输入电压
• 输出频率范围:400Hz
• 加减速时间:0.01~6000.0秒(可设置4种不同的加减速时间)
• 过载能力:额定输出电流的约200%以上瞬时保护;额定输出电流的150% 1分钟以上保护
• 过压、欠压保护:主回路电压820V以上时过压保护停机;380V以下时欠压保护停机
二,YD5000的特点
多种控制方式:
无PG矢量控制:应用于所有需要变速驱动的场合
有PG矢量控制:简易伺服驱动,高精度速度控制,力矩控制的场合
无PG V/f控制: 传统的变频器控制方式,可使一台变频器驱动多台电机
有PGV/f控制: 简易速度反馈控制,PG可以装在机械轴上。
各种控制方式的特点:
矢量控制 V/f控制
无PG 有PG 无PG 有PG
速度控制范围 1:100 1:1000 1:40 1:40
速度控制精度 ±0.2% ±0.02% ±2~3% ±0.03%
起动力矩 1Hz时150% 0r/min时150% 3Hz时150%
1,矢量控制:
• 高起动转距
无PG控制:150%/1Hz;有PG控制:150%/0rpm,实际试验结果:200%的起动负载平稳起动,并稳定运行一分钟,无过流报警。功率余量储备多,适合于各种重载起动的场合:搅拌机械、破碎粉碎机械、起重机械、扎钢机械等。
• 低速稳定性好
电流矢量控制,同时控制电机的一次电流及其相位,独立控制磁场电流和力矩电流,实现了在极低速时的平稳运行。无PG矢量控制时0.5Hz已能稳定运行;有PG矢量控制时0.1Hz就能稳定运行。输出转距同样能保持100%。虽然我们不建议在这样低的条件下长期运行,但在某些特殊场合,不用减速箱能为客户降低成本。
• 精确的力矩控制
因矢量控制使磁场与力矩互不干涉,电机能按照力矩指令精确运行。
• 自学习
高精度矢量控制模式,建立在精确的电机参数上,动态自学习模式测量电机从低到高不同频率段时的参数,获得准确的电机参数,在不同的频率段建立相应频率段的电机模型,使变频器从低到高都能精确控制电机。
2,V/f控制:
• 可以选择适合用途的预先设定的15种V/F曲线
• 也可设定任意的V/F曲线
• 15种V/F曲线可以归纳为以下几种类型
恒力矩特性
是一般用途使用的曲线,象直线性运行的传送带,与转速无 关的恒力矩使用场所
递减力矩特性
象风机、水泵那样,与转速呈2次方关系的负载场合,使用这类曲线
高起动力矩
变频器与电机之间的接线距离较长(约100m以上)、要求起动时输出力矩较大(升降机负载)、在变频器的输入或输出有AC电抗器插入、用比最大适用电机以下的电机运行
恒输出功率运行
是50Hz以上频率使其运行的曲线,50Hz以上是恒电压

3,二套电机参数
可以独立设置二套完整的电机参数,并能用多功能外部端子选择电机,方便变频器控制二台不同的电机
三,YD5000的功能
1,PID控制功能
• 简述
使用PID控制功能可实现闭环控制。所谓闭环控制,是用传感器将过程值反馈,使变频器的输出频率(电机的转速)与指令目标一致的控制方式。
PID控制是根据传感器的反馈值,对如下那样的应用有效。
•速度控制:使用脉冲编码器等速度检测,不管负载的大小使速度一致,或与其它电机同步运行。
•压力控制:将压力传感器的检出值作为反馈量,可控制压力一定。
•流量控制:使用流量传感器,可控制精度较高的流量。
•温度控制:将温度传感器检出值反馈,是风扇调速而达到控制温度。
• PID控制方式
有4种PID控制方式:
1、2为普通PID控制方式,输出完全有PI控制;

3、4为频率指令+PID控制(有前置给定频率)

1、3反馈值微分的PID控制

对反馈值进行微分,目标值的变化、控制对象的变化也可响应
2、4目标值微分的PID控制

为了追踪控制对象的变化而调整D控制的响应性的话,当目标值已变化时,会发生不足及过冲现象
• PID控制的典型应用
有张力反馈恒张力同步控制系统
直进式拉丝机
造纸及纺织的同步控制

有张力反馈恒张力收卷控制系统
流量、压力、温度等的自动控制系统
2, 转矩控制
力矩极限功能
无PG矢量控制方式下,电机的输出力矩由内部计算而来,力矩极限可以由多功能模拟量输入端子、ModBus通信卡修改L7组相应参数、通过操作面板修改L7组相关参数等输入信号任意设定。不想在负载上施加一定量以上的力矩及不想发生一定量以上的再生能量时,可以使用力矩极限功能。
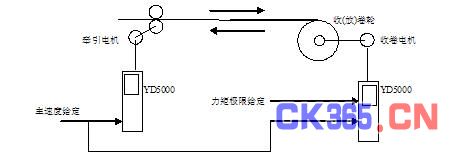
力矩极限功能的典型应用是开环力矩极限收(放)卷功能。

力矩极限的精度:在输出频率10Hz以上时,为±5%,10Hz以下时精度较低。
电机输出力矩达到力矩极限时,力矩控制优先,电机的转速控制和补偿都无效。会出现加减速时间增加及转速降低的情况,而转速降低正是收卷时所需要的特性。
力矩控制功能
力矩控制功能在有PG矢量控制方式时有效。
力矩指令同样可以由多功能模拟量输入端子、ModBus通信卡修改L7组相应参数、通过操作面板修改L7组相关参数等输入信号任意设定。
为了防止负载力矩因故断开后电机发生飞车现象,力矩控制时可以设定速度极限。速度极限的给定同样可以由多功能模拟量输入端子、ModBus通信、操作面板等输入信号任意设定。速度极限的控制功能在力矩控制的收放卷系统中非常有用,可以控制收卷的速度时刻跟随着牵引的速度,控制因过速引起的收卷故障。
力矩控制时的另一个特点是在控制过程中可以加入力矩补偿,在力矩控制的系统起动时,为克服系统的静摩擦提供了一个额外的力矩,使系统的响应更加迅速。
典型的力矩控制收放系统如下图所示。
通过多功能端子可以切换变频器的速度控制和力矩控制模式。双变频卷染机是这种方式应用的典型例子。
3,节能控制
在负载较低的时候,可以用多功能端子来起动节能控制功能。节能控制实际上是降低变频器输出电压,提高效率,降低能耗。可以设置降低电压的幅值及节能开始时的频率。节能控制只在无PG V/f控制时有效。
4,四种独立/减速设置
通过多功能输入端子可以选择四组不同的加减速时间,可以适应系统在不同时刻时的不同惯量的控制。
5,零伺服功能
零伺服只在有PG矢量控制时有效。用多功能端子设定零伺服指令。当零伺服指令有效时,并且在频率指令低于零速度电平以下时,位置控制回路变形成了,电机被锁住并保持在停止状态。伺服锁定的力矩0~100%可调,锁定电流下降50%,如需增大锁定力矩,要增大变频器的功率容量。从零伺服起作用到电机完全停止的位置容许误差可以设定,是以编码器的4倍频脉冲数来设定的。
零伺服功能应用在机械动作停止时需要保持位置的场合,也可以利用零伺服功能来完成机械的回零功能。
6,下垂控制(DROOP)
所谓DROOP控制,就是滑差量的控制。控制滑差量的大小,即可控制电机的输出特性。通常二台电机驱动一个负载时,要求电机的控制特性较软,就能容易地调整电机负载的平衡。






